Linear
XL-80 Hardware
XL-80 Applications
Angular
Straightness
XL80 laser system 58www.renishaw.com/xl80
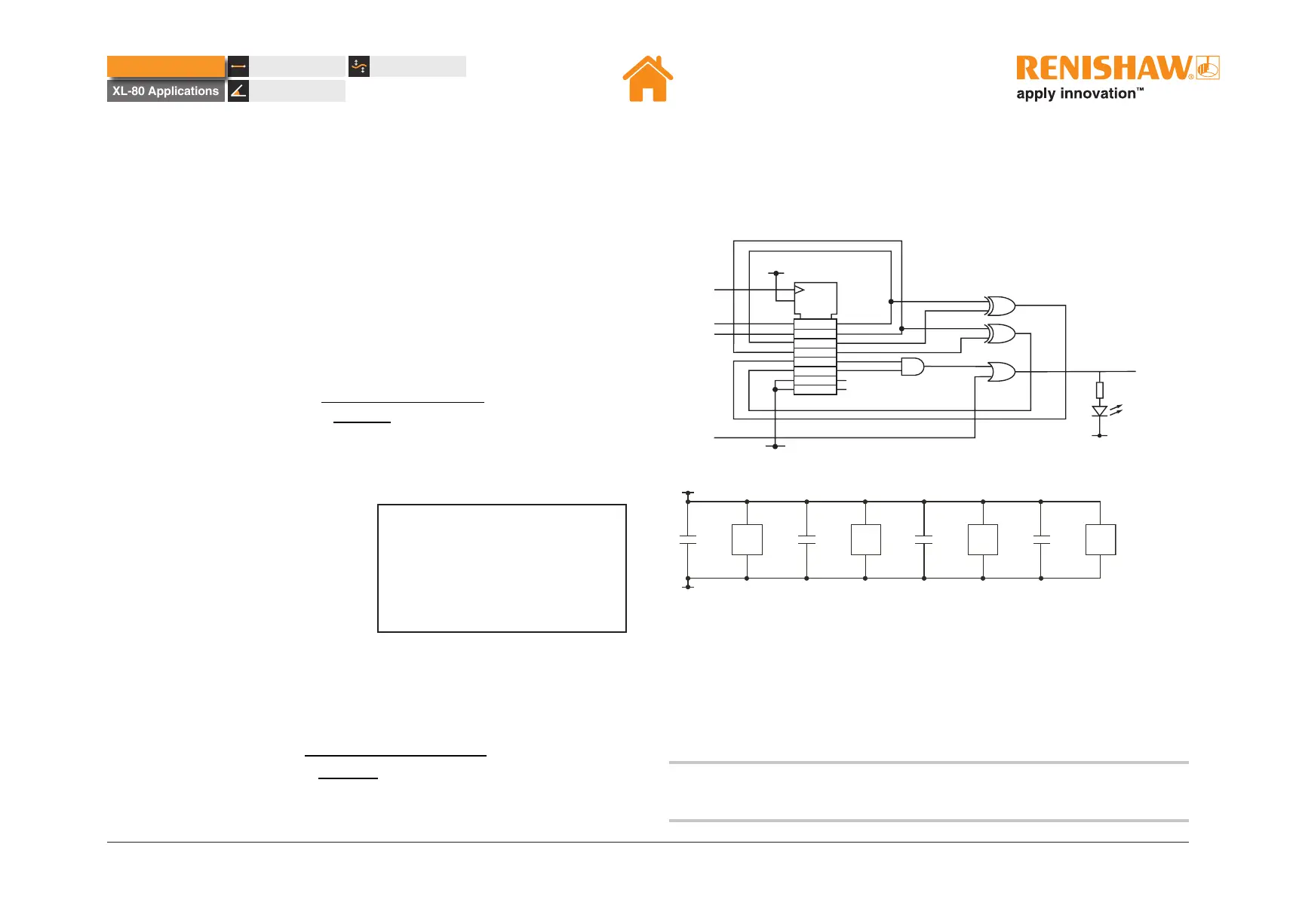
Suggested extraction of valid data
The circuit shown below can be used to extract valid quadrature� The clock
frequency should be selected according to the maximum velocity to be
measured� The circuit produces an error signal if an invalid quadrature
transition occurs� This can be caused by beam obstructions or by exceeding
the maximum velocity�
By selecting a low enough clock frequency, slow ‘edge picking’ quadrature
counters can be used�
Or for a given frequency the velocity must be:
Frequency ≥
resolution
V max
1000
_
10
_
RxSkew
(
(
(
((
max ≤
1000
Frequency
resolution
+100 +
RxSkew
(
(
(
((
IC2
3.3 V
EN
CLOCK
ERROR OUT
AQUAD
BQUAD
ERROR IN
11
1
0 V
0 V
LED
Red
IC3
IC4
IC4
IC5
3
4
7
8
13
14
17
18
2
5
6
9
12
15
16
19
3.3 V
20
10 77 7
14 14 14
10
nF10
nF 10
nF 10
nF
IC2 IC3 IC4 IC5
Where:
• Frequency is in MHz
• Resolution is in
nm = 80 nm or 10 nm
• Vmax is maximum velocity
in m/s
• RxSkew is the receiver skew
between the AQuad and BQuad
channels in ns
Example calculation:
For Vmax = 1�6 m/s
Resolution = 80 nm
Typical RxSkew = 10 ns
Frequency of clock required ≥
33�33 MHz
The maximum velocities possible are 1�6 m/s for 80 nm quadrature and
0�2 m/s for 10 nm quadrature�
Figure 7 Circuit for extraction of valid data
IC2 = FAIRCHILD 74LVX273
IC3 = FAIRCHILD 74LVX08
IC4 = FAIRCHILD 74LVX86
IC5 = FAIRCHILD 74LVX32
NOTE: Tie all unused inputs of IC3, IC4 and IC5 to 0 V� The value of Rled will
depend on the LED selected�
XL-80 Hardware
 Loading...
Loading...












