Robotiq inc. © 2016 55
4.7.1 Connection setup
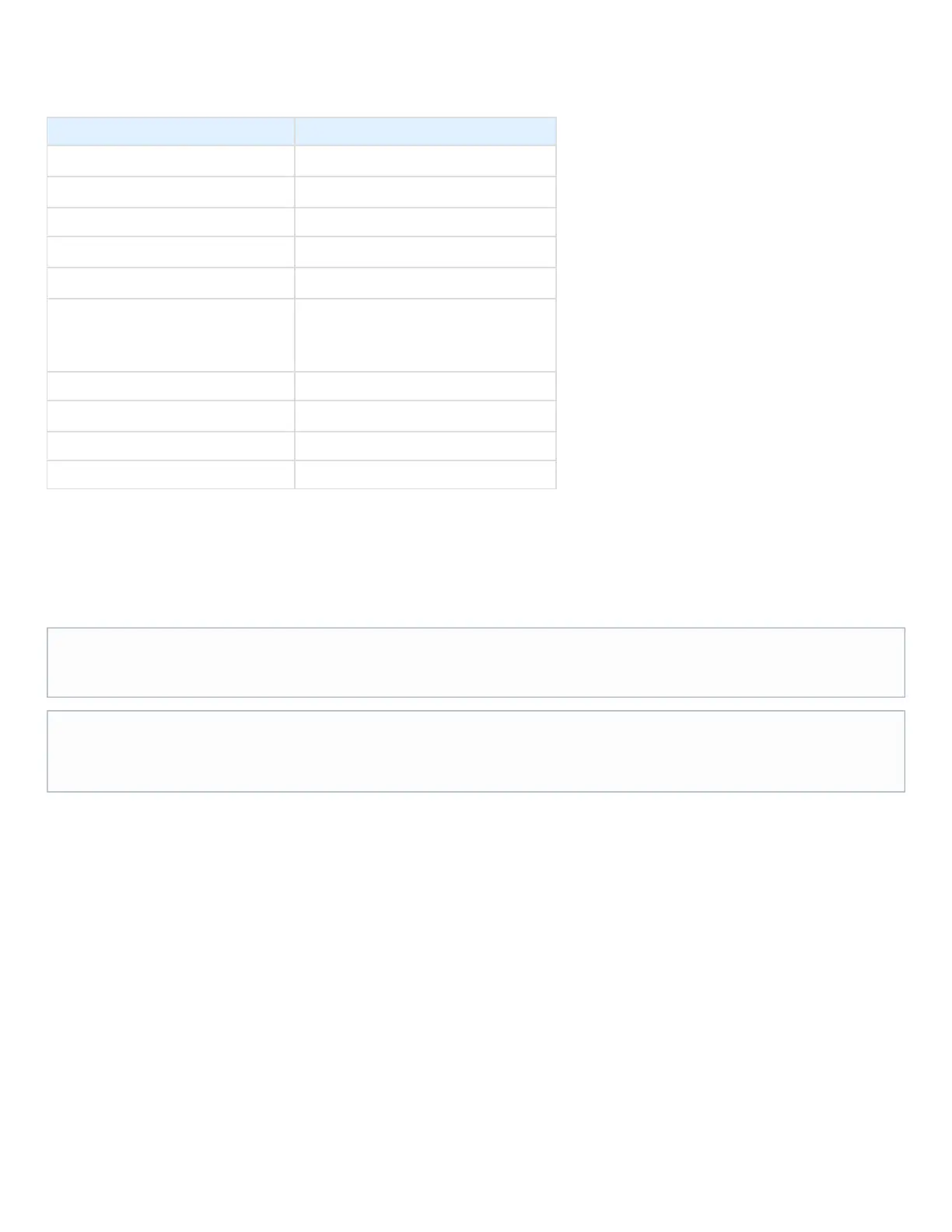
The following table describes the connection requirements for controlling the Gripper using the Modbus RTU protocol.
PROPRIETY VALUE
Physical Interface
RS-485
1
Baud Rate
2
115,200 bps
Data Bits 8
Stop Bit
2
1
Parity
2
None
Supported Functions Read Holding Register (FC03)
Preset Single Register (FC06)
Preset Multiple Register (FC16)
Master read & write multiple registers (FC23)
Exception Responses Not supported
Slave ID
2
0x0009 (9)
Robot Output / Gripper Input First Register 0x03E8 (1000)
Robot Input / Gripper Output First Register 0x07D0 (2000)
1
Various converters are available in the .Spare parts section
2
These parameters can be adjusted using the .Robotiq User Interface
Each register (word - 16 bits) of the Modbus RTU protocol is composed of bytes (8 bits) from the Gripper. The first Gripper output Modbus register2
(0x07D0) is composed from the first Robotiq Gripper bytes (byte 0 and byte 1).2
Info
200 Hz is the usual speed when commanding / reading from the Robotiq Gripper. It is therefore recommended to send commands with a
minimum delay of 5 ms between them.
Info
Maximum baud rate of is 115200 bps.ACC-ADT-USB-RS485
120 Ohms termination resistor is already present on the converter.
 Loading...
Loading...




