118 Rockwell Automation Publication 2080-UM002L-EN-E - November 2021
Chapter 7 Motion Control
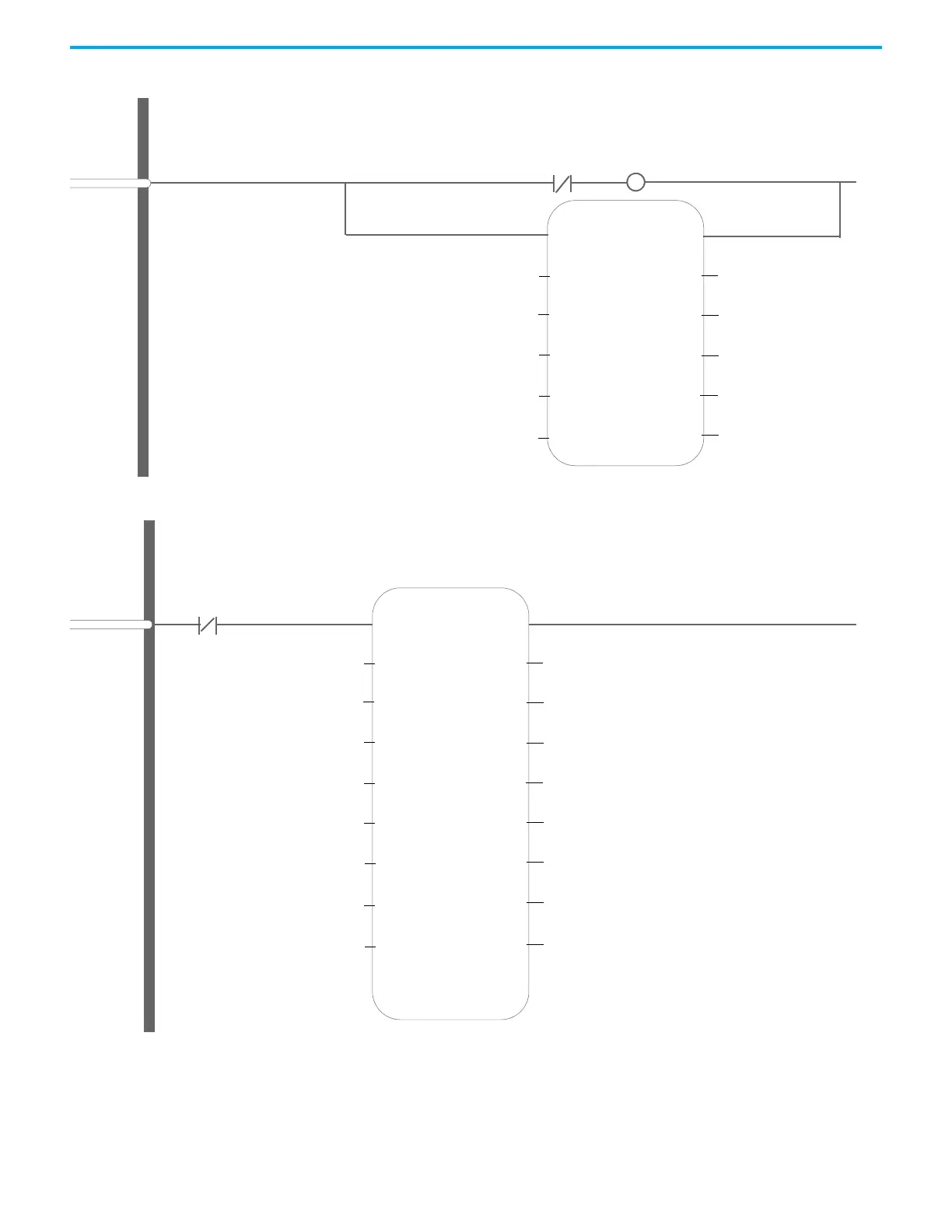
Figure 8 - Example 2: PTO Axis as a PWM
Figure 9 - Example 3: PTO Axis as a PWM
MC_WriteParameter_1
MC_WriteParameter
EN
AxisIn
Parameter_Number
Execute
Value
PWM0
Update_PWM_Duty_Cycle
1005
G_PWM_Duty_Cycle
Axis
ENO
Done
Busy
Error
ErrorID
2
Continually use MC_WriteParameter (Parameter 1005) to change the Duty Cycle from global variable G_PWM_Duty_Cycle (example: 0.5 => 50%)
MC_ExecutionMode
0
Update_PWM_Duty_Cycle
Update_PWM_Duty_Cycle
MC_MoveVelocity_1
MC_MoveVelocity
EN
AxisIn
Velocity
Execut
Acceleration
PWM0
TRUE
G_PWM_Frequency
50000.0
Axis
ENO
InVelocity
Busy
Active
Direction
CommandAborted
3
__SYSVA_FIRST_SCAN
Acceleration
50000.0
Deceleration
0.0
Jerk
1
DirectionIn
0
Error
ErrorID
After first scan, use MC_MoveVelocity to continually set the PWM frequency (for example: 50,000 => 50 KHz) from global variable G_PWM_Frequency. PWM axis will run forever
(until Program Mode, MC_Halt, and so on).

 Loading...
Loading...






