Rockwell Automation Publication 2080-UM002L-EN-E - November 2021 277
Appendix F PID Function Blocks
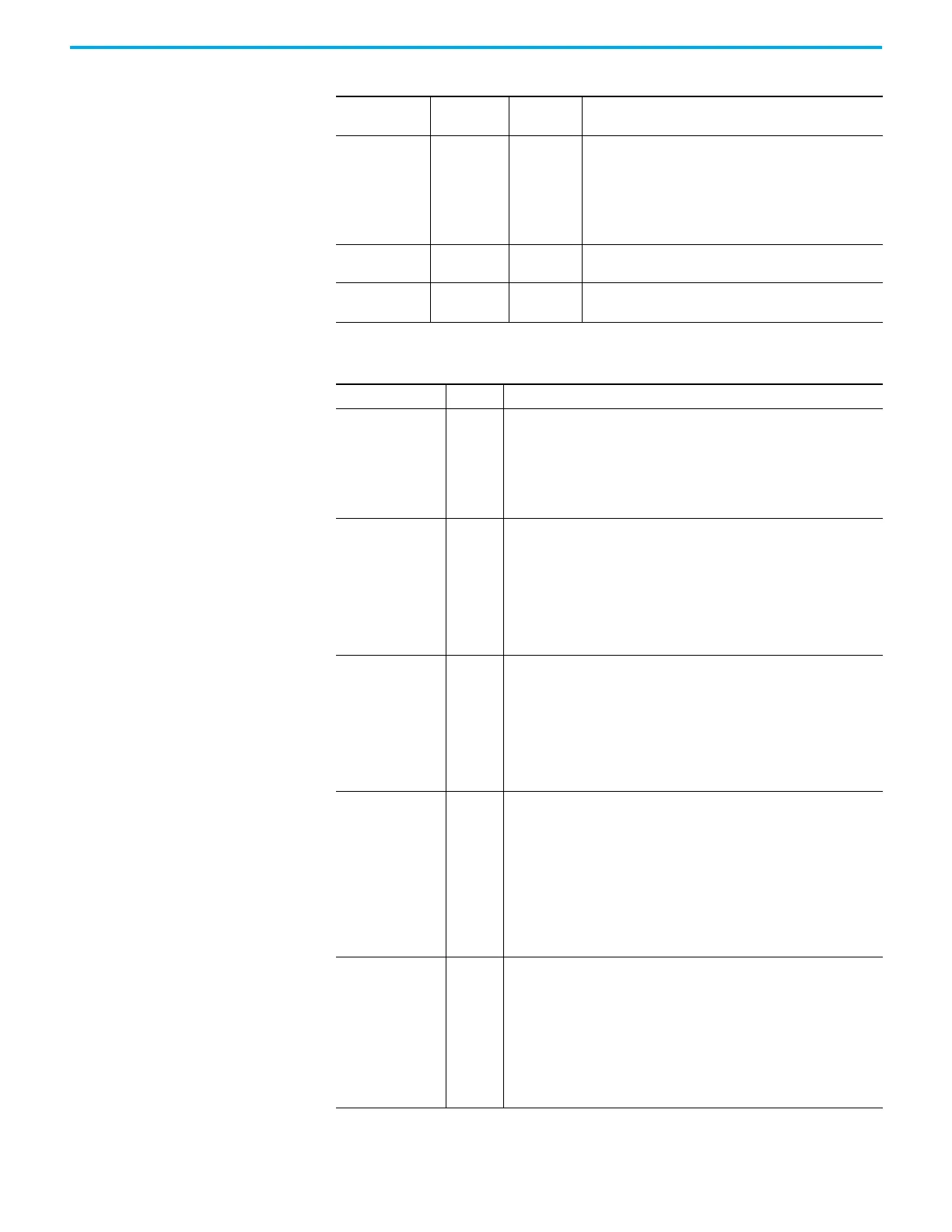
ATWarnings Output DINT
Warning for the AutoTune sequence. Possible values are:
0 = No auto tune done.
1 = In auto tune mode.
2 = Auto tune done.
-1 = Error 1: Input automatically set to TRUE, no auto tune
possible.
-2 = Error 2: Auto tune error, the ATDynamSet expired.
OutGains Output GAIN_PID
Gains calculated from AutoTune Sequences.
Use GAIN_PID data type to define the OutGains output.
ENO Output BOOL
Enable output.
Applicable to Ladder Diagram programs.
Table 62 - GAIN_PID Data Type
Parameter Type Description
DirectActing BOOL
Types of acting:
TRUE = Direct acting, output moves same direction as error. That is, the actual
process value is greater than the SetPoint and the appropriate controller action is
to increase the output. For example, Chilling.
FALSE = Reverse acting, output moves opposite direction as error. That is, the
actual process value is greater than the Setpoint and the appropriate controller
action is to decrease the output. For example, Heating.
ProportionalGain REAL
Proportional gain for PID (>= 0.0001).
Proportional gain for PID (P_Gain)
A higher proportional gain causes a larger change in the output based on the
difference between the PV (measured process value) and SV (set point value).
The higher the gain, the faster the error is decreased, but this may result in
instability such as oscillations. The lower the gain, the slower the error is
decreased, but the system is more stable and less sensitive to large errors. The
P_Gain usually is the most important gain to adjust and the first gain to adjust
while tuning.
TimeIntegral REAL
Time integral value for PID (>= 0.0001).
Time integral value for PID
A smaller integral time constant causes a faster change in the output based on
the difference between the PV (measured process value) and SV (set point value)
integrated over this time. A smaller integral time constant decreases the steady
state error (error when SV is not being changed) but increases the chances of
instability such as oscillations. A larger integral time constant slows down the
response of the system and make it more stable, but PV approaches the SV at a
slower rate.
TimeDerivative REAL
Time derivative value for PID (> 0.0).
Time derivative value for PID (Td)
A smaller derivative time constant causes a faster change in the output based on
the rate of change of the difference between PV (measured process value) and
SV (set point value). A smaller derivative time constant makes a system more
responsive to sudden changes in error (SV is changed) but increases the chances
of instability such as oscillations. A larger time constant makes a system less
responsive to sudden changes in error and the system is less susceptible to
noise and step changes in PV. TimeDerivative (Td) is related to the derivative gain
but allows the derivative contribution to PID to be tuned using time so the sample
time must be taken into consideration.
DerivativeGain REAL
Derivative gain for PID (>= 0.0).
Derivative gain for PID (D_Gain)
A higher derivative gain causes a larger change in the output based on the rate of
change of the difference between the PV (measured process value) and SV (set
point value). A higher gain makes a system more responsive to sudden changes
in error but increases the chances of instability such as oscillations. A lower gain
makes a system less responsive to sudden changes in error and makes the
system less susceptible to noise and step changes in the PV.
If derivative gain is set to zero, it disables the derivative portion of the
PID.
Table 61 - IPIDCONTROLLER Arguments (Continued)
Parameter
Parameter
Type
Data Type Description

 Loading...
Loading...






