RTC
®
4 PC Interface Board
Rev. 1.3 e
10 Commands And Functions
73
innovators for industry
10.3 Command Set
All commands are arranged in alphabetical order.
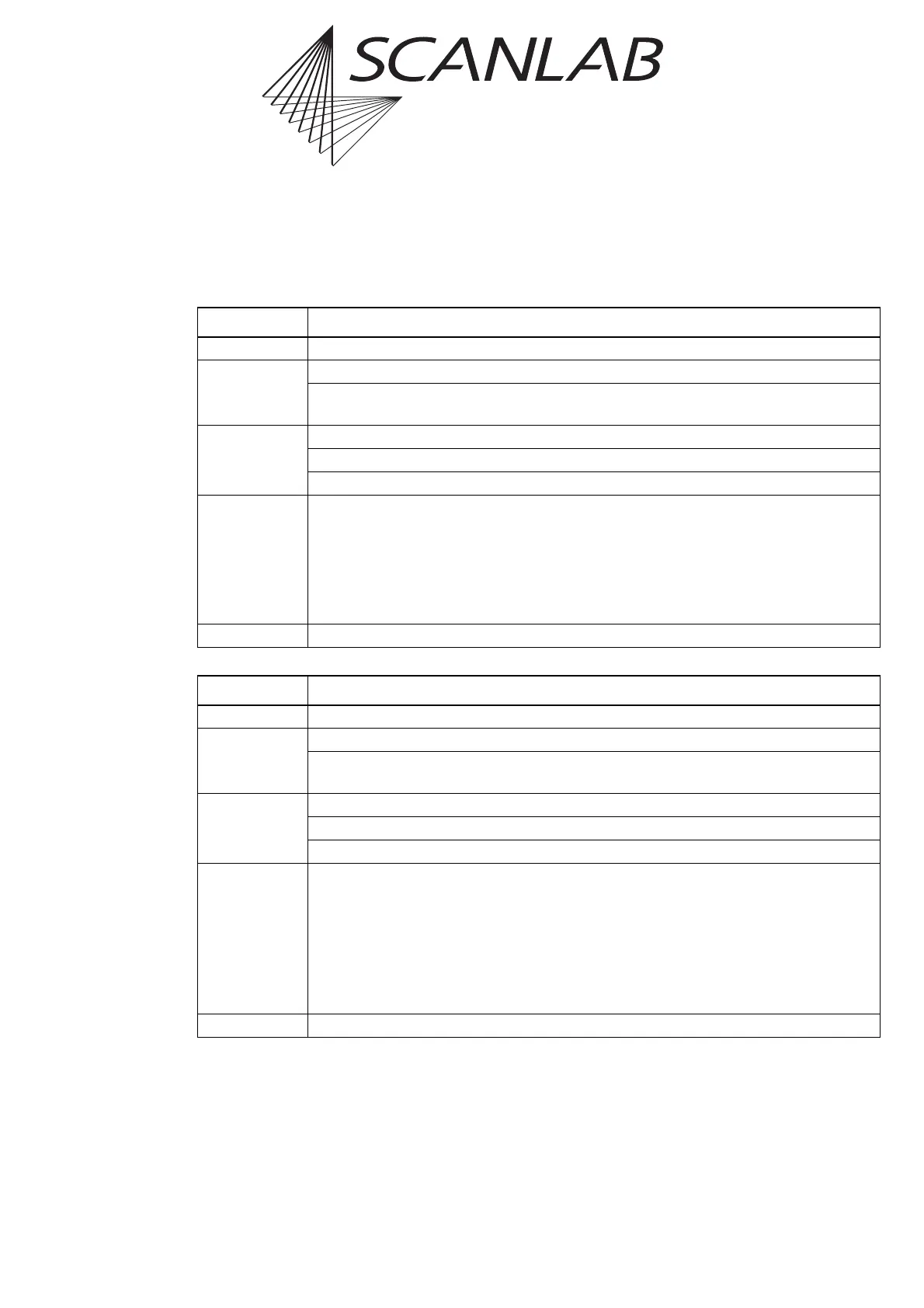
List Command arc_abs
Function marking along the specified circular arc starting at the current position
Parameters
x,y
absolute coordinates of the arc center in bits as signed 16-bit values
angle
arc angle in ° [–360.0° … +360.0°] as 64-bit IEEE floating point value
(positive angle values correspond to clockwise angles)
Integration Pascal:
arc_abs(x,y: smallint; angle: double);
C:
void arc_abs(short x, short y, double angle);
Basic:
arc_abs(ByVal x%, ByVal y%, ByVal angle#)
Comments • The maximum allowed arc radius (in bits) is 32767.
• The marking speed is set with the command set_mark_speed (see page 109).
• The laser is turned on at the beginning of the command after a LaserOn delay.
• If another arc or mark command follows, a polygon delay is inserted, and the laser stays
on. Otherwise a mark delay is inserted and the laser is turned off after a LaserOff delay.
• See chapter 4.2 "Scan Head And Laser Control", page 15, for further details.
References set_mark_speed, set_scanner_delays, arc_rel
List Command arc_rel
Function marking along the specified circular arc starting at the current position
Parameters
dx,dy
relative coordinates of the arc center in bits as signed 16-bit values
angle
arc angle in ° [–360.0° … +360.0°] as 64-bit IEEE floating point value
(positive angle values correspond to clockwise angles)
Integration Pascal:
arc_rel(dx,dy: smallint; angle: double);
C:
void arc_rel(short dx, short dy, double angle);
Basic:
arc_rel(ByVal dx%, ByVal dy%, ByVal angle#)
Comments • The arc center coordinates are relative to the current position.
• The maximum value for the absolute arc center coordinates is ±32767 bits.
• The marking speed is set with the command set_mark_speed (see page 109).
• The laser is turned on at the beginning of the command after a LaserOn delay.
• If another arc or mark command follows, a polygon delay is inserted, and the laser stays
on. Otherwise a mark delay is inserted and the laser is turned off after a LaserOff delay.
• See chapter 4.2 "Scan Head And Laser Control", page 15, for further details.
References set_mark_speed, set_scanner_delays, arc_abs