Operating Manual 90° ACTUSAFE CMF(S)QT
OM-ENGLISH-Failsafe-QT-16xx-V2.00-2022.03.01 7 Parameter menu
7.7 Parameter group: Position
In addition to OPEN and CLOSED end positions, you may define intermediate positions. These can be used as feedback
signals for the binary outputs or as target value for fix position approach.
NOTE: If you change the end positions (see section 7.1, page 42), intermediate positions are retained percentage-wise,
i.e., the absolute positions of the intermediate positions change.
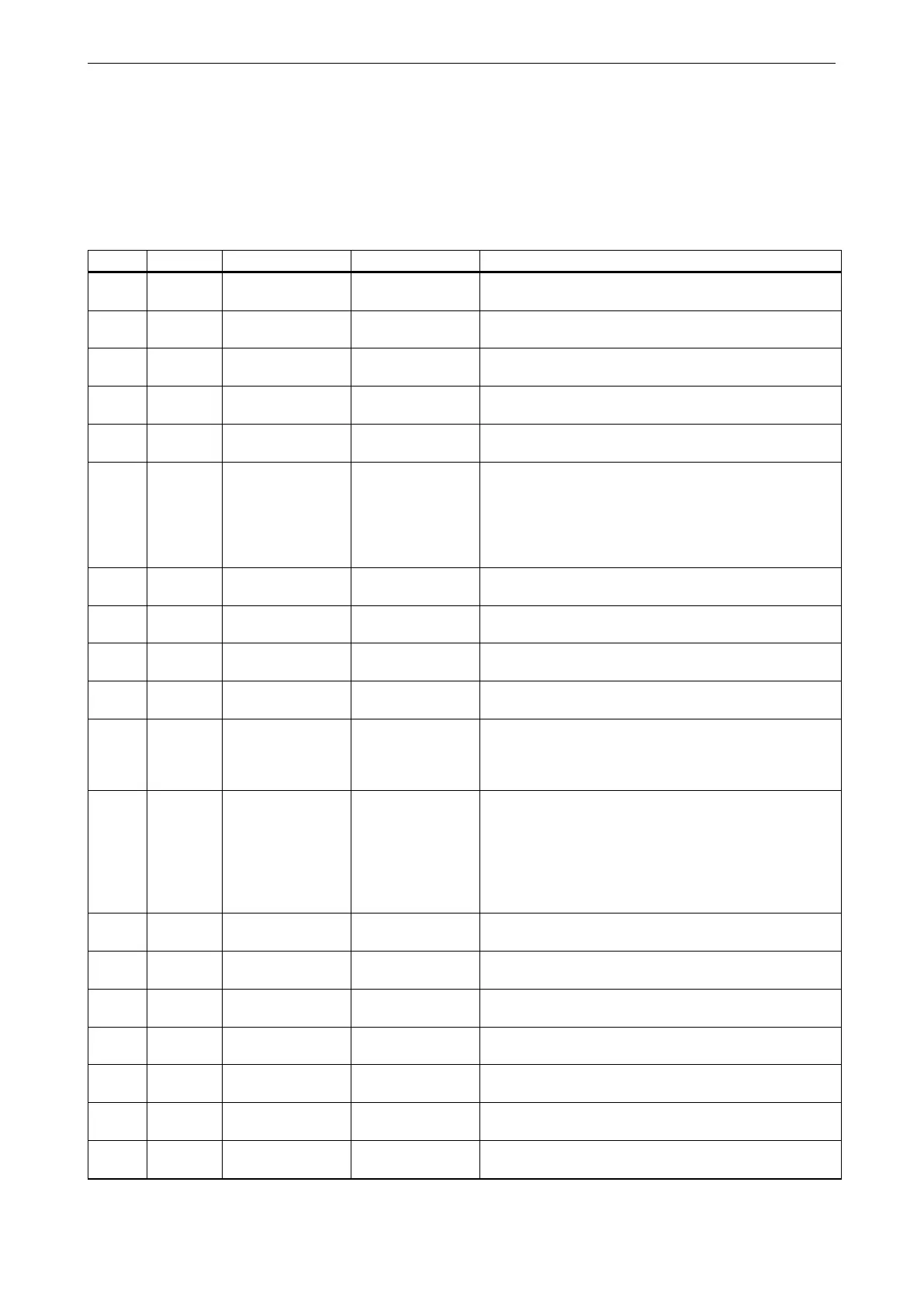
Menu item Sub-menu item poss. setting Notes / comments
P8.1 Position Intermed.pos.1
TEACHIN
0. . . 100%
Position value of intermediate position 1
P8.2 Position Intermed.pos.2
TEACHIN
0. . . 100%
see above
P8.3 Position Intermed.pos.3
TEACHIN
0. . . 100%
see above
P8.4 Position Intermed.pos.4
TEACHIN
0. . . 100%
see above
P8.5 Position Emerg.position
TEACHIN
0. . . 100%
Position value of the emergency position.
P8.6 Position Hysteresis 0.1. . . 10.0%
Hysteresis range of intermediate positions. Within this
hysteresis, no repositioning occurs upon reaching the
intermediate positions (option: fix position approach).
Furthermore, the output functions for position =
intermediate position are active within this range (see
P10.1).
P8.7 Position Intermed.pos.5
TEACHIN
0. . . 100%
see above
P8.8 Position Intermed.pos.6
TEACHIN
0. . . 100%
see above
P8.9 Position Intermed.pos.7
TEACHIN
0. . . 100%
see above
P8.10 Position Intermed.pos.8
TEACHIN
0. . . 100%
see above
P8.11 Position Dead Band 0. . . 10%
Tolerance range for the position deviation (intermediate
position - actual position), where no adjustment occurs.
The deadband should not be set too low, to prevent
actuator oscillation.
P8.12 Position Gain 0. . . 100%
The gain (gradient) affects the positioning to the target
intermediate position. The smaller the gain selected (e.g.
20%), the earlier the actuator starts reducing its speed in
case of speed variable actuators on approaching the
target position. This leads to better positioning (smaller
reachable deadband). A 100% setting disables this
gradient.
P8.13 Position Hysteresis 0. . . 100%
This hysteresis value applies to the set value in "P8.11 -
Dead Band".
P8.14 Position Intermed.pos.9
TEACHIN
0. . . 100%
see above
P8.15 Position Intermed.pos.10
TEACHIN
0. . . 100%
see above
P8.16 Position Intermed.pos.11
TEACHIN
0. . . 100%
see above
P8.17 Position Intermed.pos.12
TEACHIN
0. . . 100%
see above
P8.18 Position Intermed.pos.13
TEACHIN
0. . . 100%
see above
P8.19 Position Intermed.pos.14
TEACHIN
0. . . 100%
see above
continued on next page
49