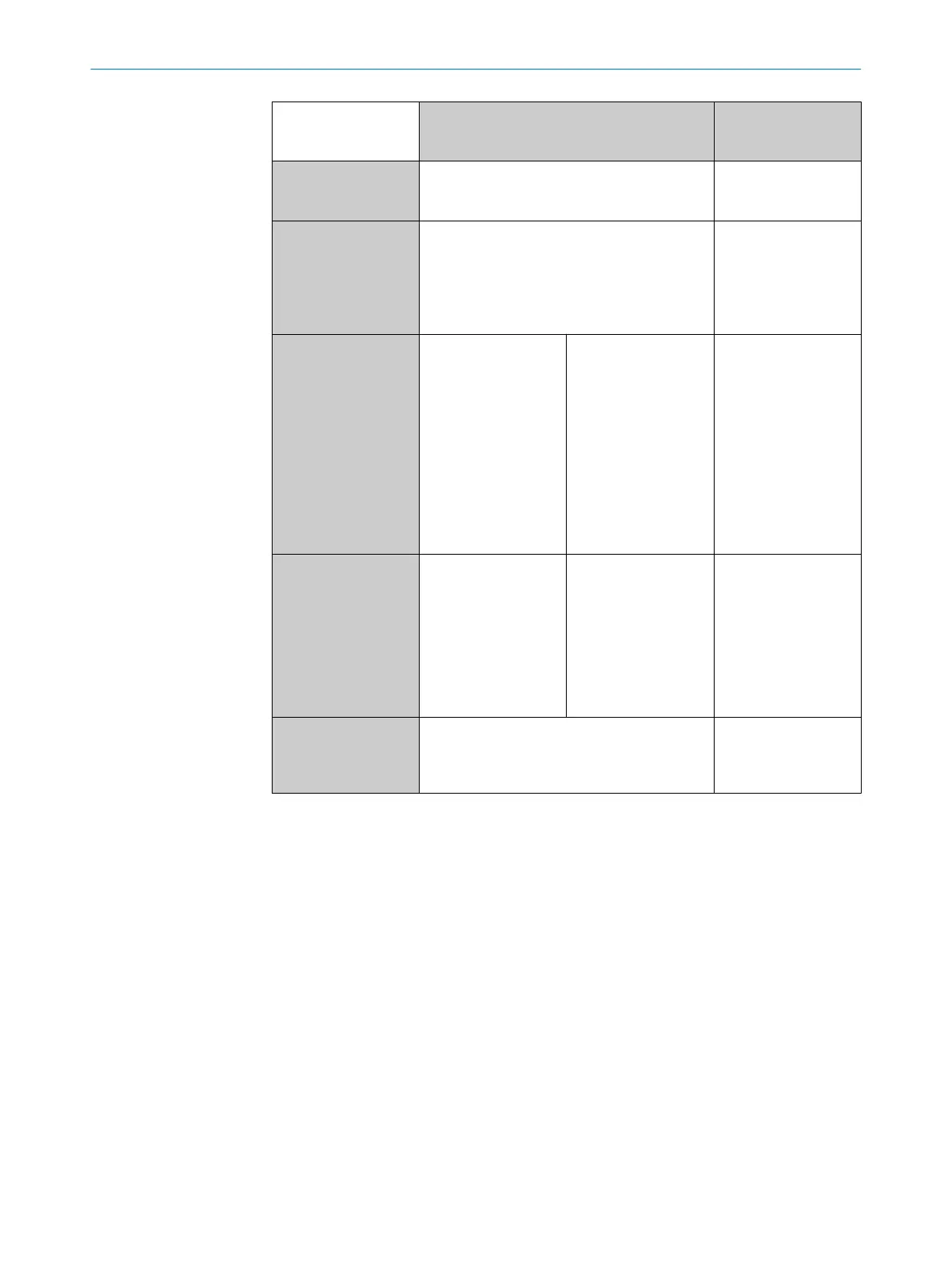
Teach-in mode Dynamic Teach
Aut
omated switching point teach-in
Manual Teach
Manual switching
point teach-in
Are switching points
(SP) tau
ght in inde‐
pendentl
y?
NO
Depending on the requirement, 2 or 3 Qints
can be taught in one process.
YES
Up to 3 SP are taught
in independently.
Is Dynamic Pilot ac
tive? YES
In Dynamic Pilot, there are 2 conditions for Qint
during operation
ON: The piston velocity must be v = 0
1
and the
magnet must be within the tolerance band
defined in Dynamic Teach.
NO
If t
he switching points
are taught in manu‐
ally, there is no
Dynamic Pilot.
Arrangement of
s
w
itching points
Always the same
Qint1 lies in the direc‐
tion of the cable outlet
and Qint2 in the direc‐
tion of the sensor fix‐
ing screw
Depends
The switching points
are assigned as fol‐
lows:
Qint1 = idle
Qint2 = object
Qint3 = noobject
That is why the
arrangement depends
on whether an internal
or external gripper is
used.
Free arrangement
T
he Qint1, Qint2 and
Qint3 switching points
can be freely set.
Application End position detec‐
t
ion:
A
utomated teach-in of
2 switching points via
Dynamic Teach is
intended for end posi‐
tion detection on a
pneumatic cylinder.
Gripper status detec‐
tion:
The automated teach-
in of 3 switching
points via Dynamic
Teach is intended for
gripper status detec‐
tion.
Other applications:
If neither only the end
positions on a pneu‐
matic cylinder nor grip‐
per statuses are to be
taught in automati‐
cally, manually teach‐
ing switching points is
recommended.
Measuring range The me
asuring range of t
he sensor must cover
the complete stroke.
The measuring range
of the sensor must
NOT cover the com‐
plete stroke.
1
v = speed
For dynamic teach-in of 2 switching points via D
ynamic
Teach, it is assumed that the end
positions of a piston should be detected in a pneumatic cylinder. If the 2 switching
points are to be placed randomly within the measuring range, we recommend teaching
in the 2 switching points manually via Manual Teach.
For dynamic teach-in of 3 switching points via Dynamic Teach, it is assumed that 3 sta‐
tuses of a pneumatic gripper should be detected during the gripping process.
•
Status 1 “idle”: Gripper open without object (external gripper) / Gripper closed
without object (internal gripper)
•
Status 2 “object”: Gripper closed without object (external gripper) / Gripper open
with object (internal gripper)
•
Status 3 “noobject”: Gripper closed without object (external gripper) / Gripper
open without object (external gripper)
If the 3 switching points are to be placed randomly within the measuring range, we rec‐
ommend teaching in 3 switching points manually via Manual Teach.
8.3.1 Dynamic Teach
Dynamic Teach is used t
o ha
ve the sensor automatically set the switching points.
8 OPERATION
28
O P E R A T I N G I N S T R U C T I O N S | MPS-G with 2 / 3 switching points and IO-Link (up to 16 switching points) 8025942/2020-07-16 | SICK
Subject to change without notice

 Loading...
Loading...