Table 4-2 Explanation regarding encoder combinations
--- This combination is not permissible.
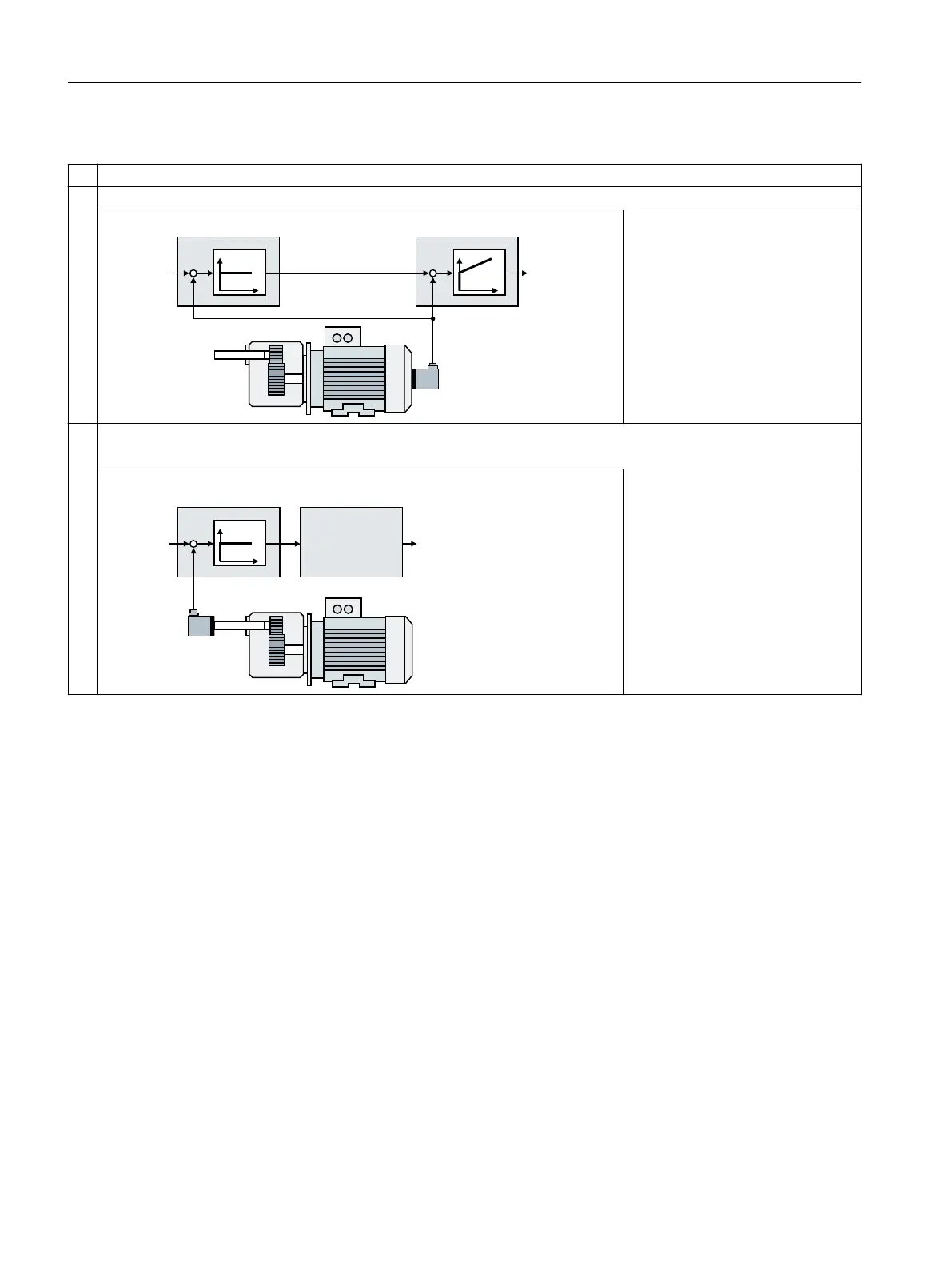
① Position controllers and speed controllers use the same encoder on the motor shaft.
(QFRGHU
6SHHGFRQWUROOHU3RVLWLRQFRQWUROOHU
7RUTXH
VHWSRLQW
3RVLWLRQ
VHWSRLQW
.
3
7
1
.
3
Depending on the gear ratio, restric‐
tions regarding the accuracy of the
position control.
Not suitable for position control in
the case of mechanical slip on the
load side
② The position controller evaluates an encoder on the motor shaft or on the load side.
The speed controller operates without an encoder.
7RUTXHVHWSRLQWRU
PRWRUYROWDJH
(QFRGHU
6HQVRUOHVVYHFWRUFRQWURORU9I
FRQWURO
3RVLWLRQFRQWUROOHU
3RVLWLRQ
VHWSRLQW
.
3
Restrictions regarding the accuracy
and dynamic performance of the po‐
sition control
Not suitable for the position control
of hoisting gear
The "Travel to xed stop" EPos func‐
tion is not possible.
Permissible encoder combinations
Basic positioner
16 Function Manual, 09/2020, FW V4.7 SP13, A5E34257659B AG

 Loading...
Loading...

























