Start-Up
SINUMERIK 802C base line
4-35
Start-Up
4.7.2 Starting up the axes
Overview
The SINUMERIK 802C base line has up to three servo motor feedrate axes (X,
Y and Z). The servo motor drive signals are output at connector
X7
for the:
z
X axis (SW1, BS1, RF1.1, RF1.2)
z
Y axis (SW2, BS2, RF2.2, RF2.2)
z
Z axis (SW3, BS3, RF3.1, RF3.2)
z
Spindle (SW4, RF4.1, RF4.2)
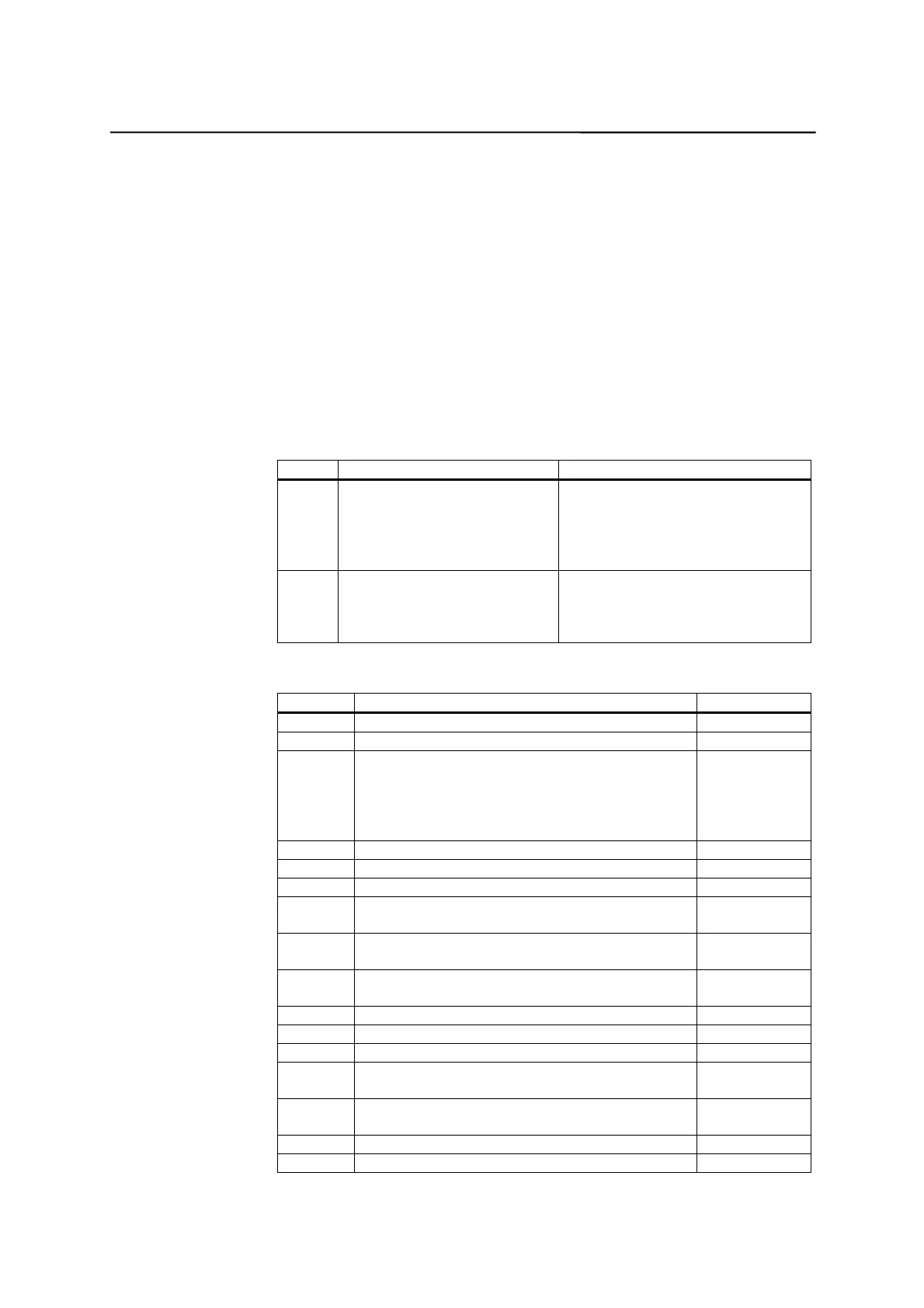
Simulation/servo motor drive
Setpoint output and pulse feedback can be switched between simulation and drive
operation using the axis MD 30130_CRTLOUT_TYPE and 30240_ENC_TYPE.
Table 4–12
MD Simulation Normal Operation
30130 Value = 0
To test the axis, the actual
value is fed back internally as
an actual value. No setpoint
output at connector X7.
Value = 1
The setpoint signals for stepper
motor operation are output at
connector X7. Real axis traversal is
possible using a servo motor.
30240 Value = 0 Value = 2
Internal pulse feedback from
setpoint output to actual value input
“ON”
Machine data for axes and spindle
Number Explanation Default Value
30130 Output type of setpoint (setpoint branch): 0
30200 Number of encoders 1
30240 Type of actual value acquisition (actual position
value) (encoder no.)
0: Simulation
2: Square–wave generator, standard encoder
(pulse multiplication)
0
30350 Output of axis signals with simulation axes 0
31020 Encoder markings per revolution (encoder no.) 2048
31030 Pitch of leadscrew 10
31040 Encoder mounted directly to the machine
(encoder no:)
0
31050 Denominator load gearbox (control parameter
no.): 0...5
1
31060 Numerator load gearbox (control parameter set
no.): 0...5
1
31070 Denominator resolver gearbox (encoder no.) 1
31080 Numerator resolver gearbox (encoder no.) 1
32100 Traversing direction (not control direction) 1
32110 Sign actual value (control direction) (encoder
no.)
1
32200 Servo gain factor (control parameter set no.):
0...5
1
32250 Rated output voltage 80
32260 Rated motor speed (setpoint branch): 0 3000