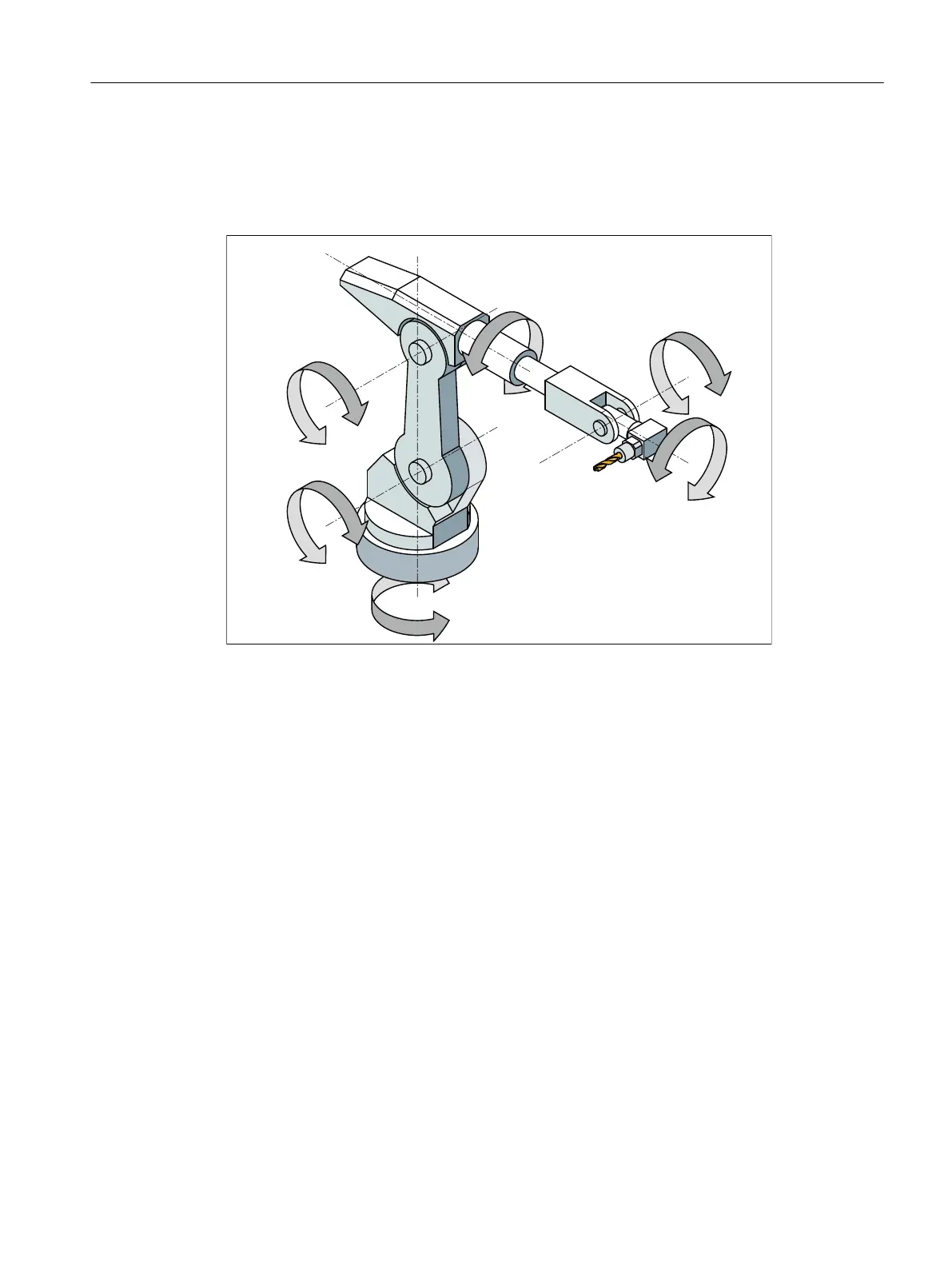
The use of STAT is to be illustrated by the example of a 6-axis articulated robot with milling
spindle. The kinematic transformation is to be realized using the ROBX robot transformation
(precondition: Compile cycle "RMCC/ROBX Transformation Extended Robotics" is loaded and
active).
Axes A1, A2 and A3 are the main axes of the articulated robot. The axes A4, A5 and A6, which
are also designated as head or hand/wrist axes, are positioned in the working area with the
main axes. The additional motion options of the hand/wrist axes enable the milling spindle to be
orientated in space as required for the particular machining task. Various articulated joint
positions are possible to achieve the same tool orientation.
Work preparation
3.9 Transformations
NC programming
Programming Manual, 12/2019, 6FC5398-2EP40-0BA0 709

 Loading...
Loading...














