| 47
The alarm system | AP70/AP80 Operator Manual
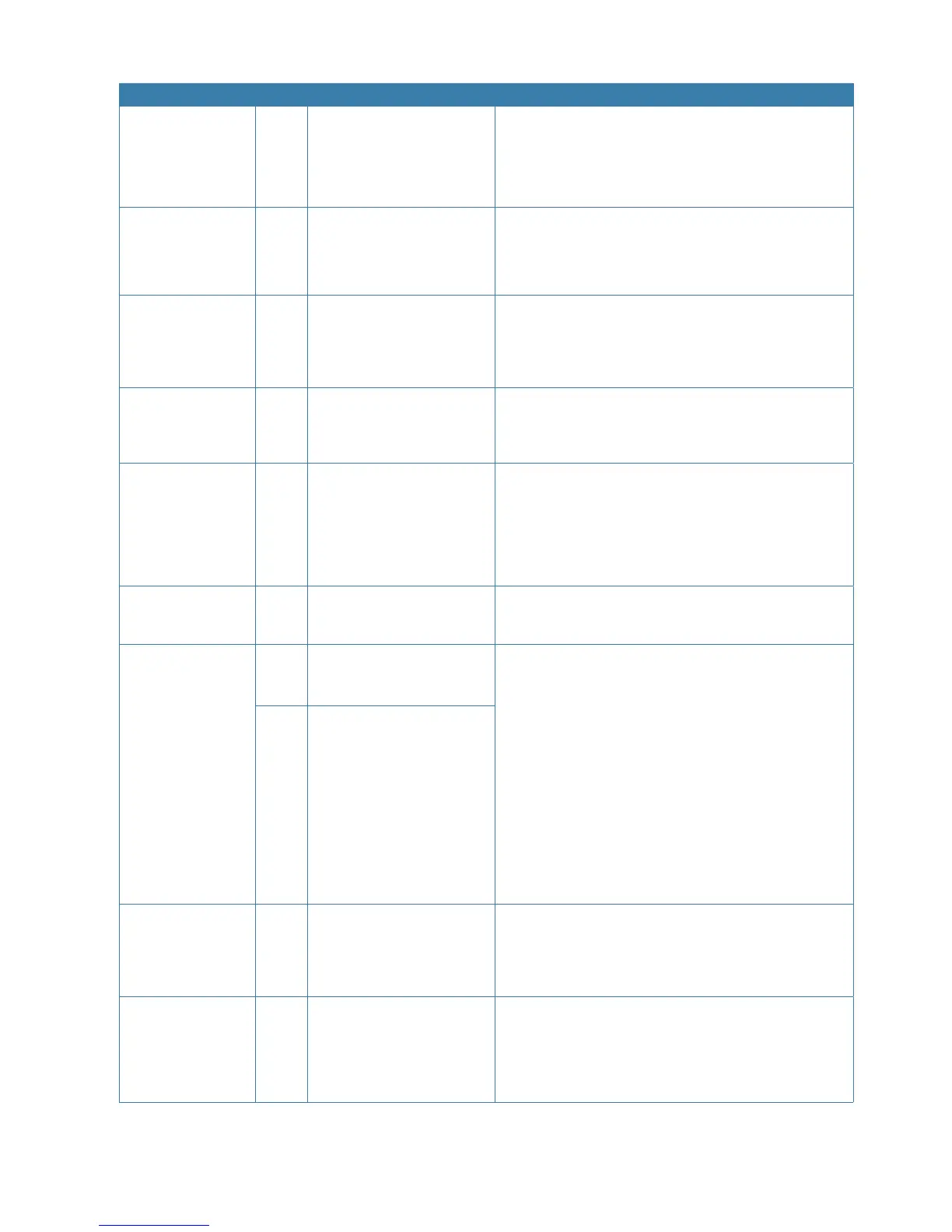
Alarm/Warning Type Warning/Alarm condition Possible cause and recommended action
Override W
1. EVC override via SG05
2. Override via SD80/AD80
Handshake (ref. KaMeWa)
3. Override via SD80/AD80
RUD UI port
If unintended warning, make sure override handle is
not being activated by loose objects. Check cabling and
override switches connected to Handshake port of faulty
SD80 or AD80 board
Position data missing W/A
Lost sensor data
(NoDrift mode)
Position data from the GPS is missing.
1. Check Device list for valid position source
2. Try a new automatic source update
3. Check the GPS and cable connections
Rudder data missing A
Rudder angle signal to faulty
board is missing
If several rudder angle sensors, check which one the faulty
board is set up for use (refer “Drive test/calibration” on page
62). If the missing sensor is connected to an autopilot
computer check cabling to the board. If missing sensor is a
CAN device, check backbone bus network connection.
Rudder limit W
Limit rel. to rudder cmd in
auto modes. Not applicable
for NFU/FU where rudder
shall stop at max -3°
The set rudder limit has been reached or exceeded. This
is a warning only and may be caused by disturbance
to compass (waves), speed log, sharp turn or improper
parameter setting.
Rudder too slow W
Rudder speed from RF < 2°/
sec
Excessive load on steering gear. Air in hydraulic system.
Insufficient drive unit capacity.
1. Look for mechanical obstructions at the rudder/tiller/
quadrant. Check the back drive force
2. Bleed the hydraulic system
3. Replace with bigger pump unit
Sharp turn W
Acceleration > set g-limit
(Alarms - settings)
If unintended warning, check that the boat speed to the
autopilot is correct. Check that set turn rate or radius
corresponds to actual
Drive overload
W
AC70: Motor/sol current >
30 A
SD80: Sol current >8 A
Reversible motor
Motor stalls or is overloaded
4. Fix possible mechanical blocking of rudder.
5. If heavy sea at high rudder angle, try to reduce boat
speed or rudder angle by steering at another heading
6. Make sure there is no shortage to ground or cabling
damage, disconnect cable from AC70 to motor, and
make sure there is no alarm when trying to run NFU-
mode
Solenoids
Shortage to ground or cabling damage. Same action as for
motor
A
AC70: Mot/sol current > 55 A
SD80: Sol current > 9 A
Steering compass
missing
A Lost sensor data
No data from the selected steering compass. If no monitor
(back up) compass; the autopilot goes to STBY mode.
If Monitor compass; the autopilot switches to monitor
compass. If there is a difference the autopilot will gradually
synchronize with the new heading (2 minutes).
Thruster inhibited W Vessel speed > set limit
The vessel speed exceed the set limit for when thrusters
can be used.
¼ Note: The Thruster inhibit limit will only apply when
speed source is Log or SOG, not if the speed is set
manually.