Software version
Check to make sure you have the latest software.
Serial Number
This number should be recorded for support and insurance purposes.
MARPA status
The MARPA status can identify if a heading sensor is on the network and that the radar is
receiving heading information essential for MARPA calculations.
Reset device ID
Should a radar be connected to the network that has been connected to a dual radar
network in the past, it might not be detected by the system because it might have an invalid
Device ID. With the radar connected and powered up, select the Reset Device ID button to
resolve this problem.
Ú
Note: This procedure must be performed with only one radar on the network, and only
applies where a network combines an older MFD with other MFDs.
Adjust range offset
(Pulse Radar only)
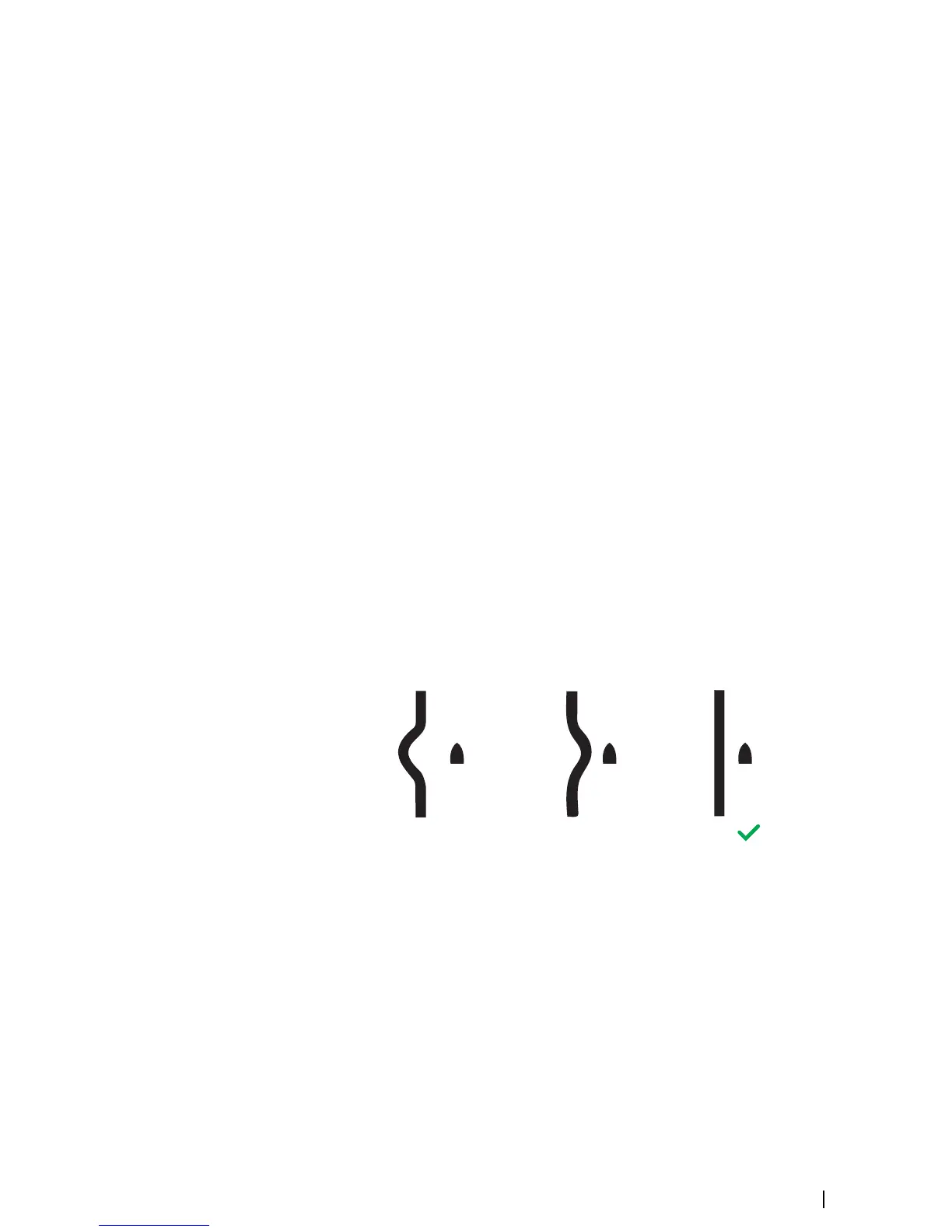
The radar sweep should commence at your vessel (a radar range of zero). You may need to
adjust the radar range offset to achieve this. If this is set incorrectly, a large dark circle in the
center of the sweep might occur. You might notice straight objects such as straight sea walls
or piers having curves or an indentation. Objects close to your vessel may appear “pulled in”
or “pushed out".
Adjust the range offset as below when the vessel is about 45 to 90 m (50 to 100 yards) from a
straight-walled jetty or similar feature that produces a straight line echo on the display.
• Point the boat towards the jetty
• Adjust the gain setting until a reasonably good image of the jetty echo is displayed
Adjust antenna height
Set the radar scanner height relative to the water surface. The Radar uses this value to
calculate the correct STC settings.
Adjust bearing alignment
This is to align the heading marker on the screen with the center line of the vessel. This will
compensate for any slight misalignment of the scanner during installation. Any inaccuracy
will be evident when using MARPA or chart overlay.
Point the boat to be perpendicular to the very end of a breakwater or peninsula. Adjust the
bearing alignment setting, so that the heading marker and land mass intersect.
Sidelobe suppression
Occasionally false target returns can occur adjacent to strong target returns such as large
ships or container ports. This occurs because not all of the transmitted radar energy can be
Software Setup | NSS evo3 Installation Manual
31