Operation instructions
SIPOS SEVEN ECOTRON
Page 6 Y070.301/EN
2 General information
2
General information
2 General information
2�1 Functional principle
Description
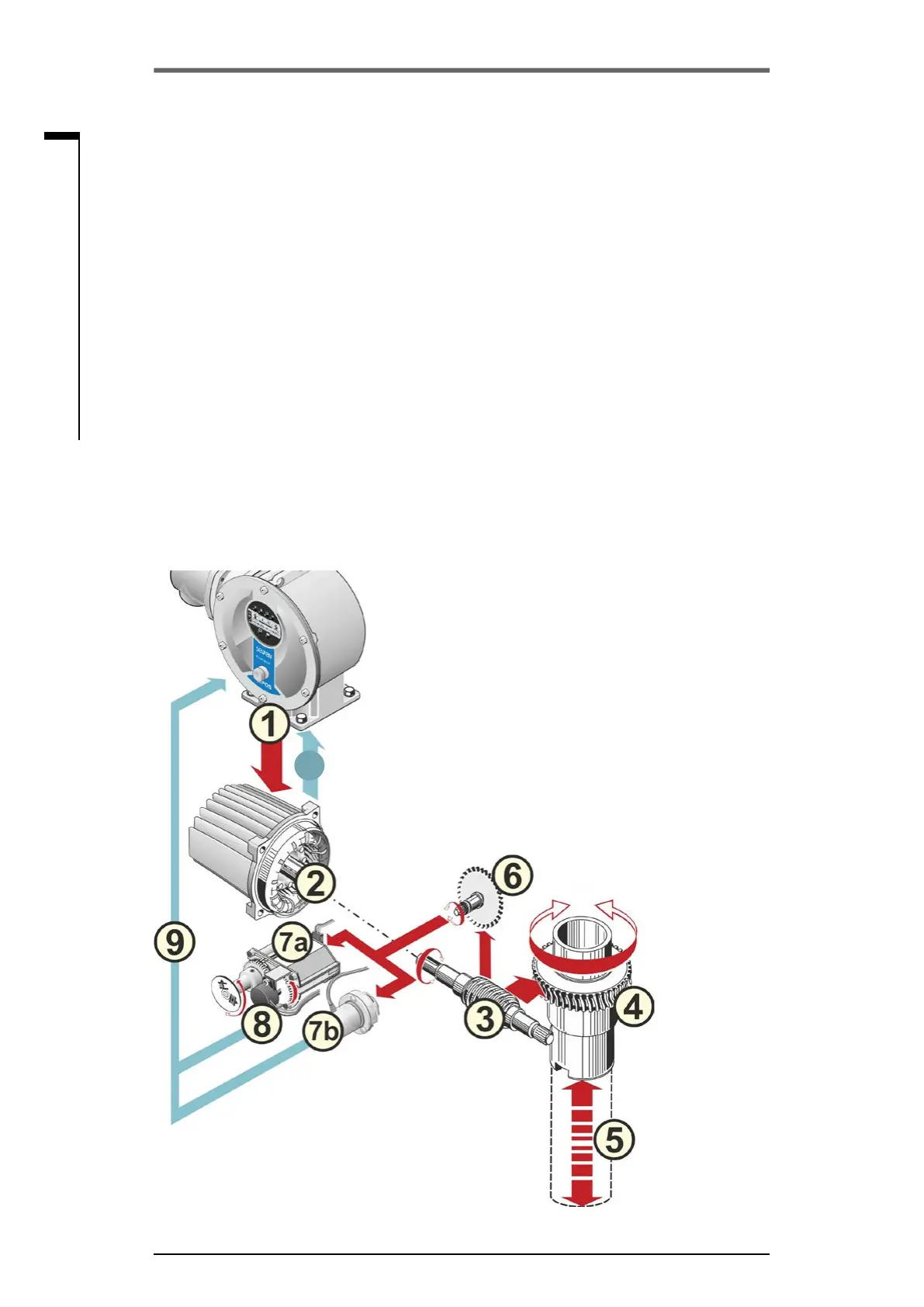
The electronics with integral frequency converter (1) controls the motor (2). The motor turns the
output drive shaft (4) via the worm shaft (3). The output drive shaft (4) drives a gear or a valve stem
(5) via a stem nut.
The motion of the worm shaft (3) is transferred via the signaling shaft (6) to
■
The signaling gear (7a). The signaling gear reduces the movement and turns the potentiometer
(8)�
or:
■
The non-intrusive position encoder (niP) (7b) for "non intrusive“ version. The non-intrusive po-
sition encoder counts the number of rotations and records the position within one rotation. The
position recording is also performed without external power supply.
From the position of the potentiometer or the non-intrusive position encoder, the electronics recog-
nizes the position of the output shaft (9) and therefore the position of the operated valve. The motor
is controlled according to the process requirements.
The torque detection (TD) is performed electronically.
TD
Fig�: Functional principle

 Loading...
Loading...