IMU User Guide revision 3.1 SMC Ship Motion Control www.shipmotion.eu
4.10.7 STRING INPUT
When using crane serial input communication, the data has to be transmitted over an RS232 serial
interface.
When the crane position data is being fed into the motion sensor, the output string from the unit will
use the current crane position for a remote heave calculation. For the motion sensor to calculate the
remote heave on an operating crane installation the crane encoder readings are transferred to the
motion sensor for the new crane working position. Below is the description of the predefined data
strings to be sent to the motion sensor serial input
Two string options are available for the data input
$PENCR and $PENCO
$PENCR
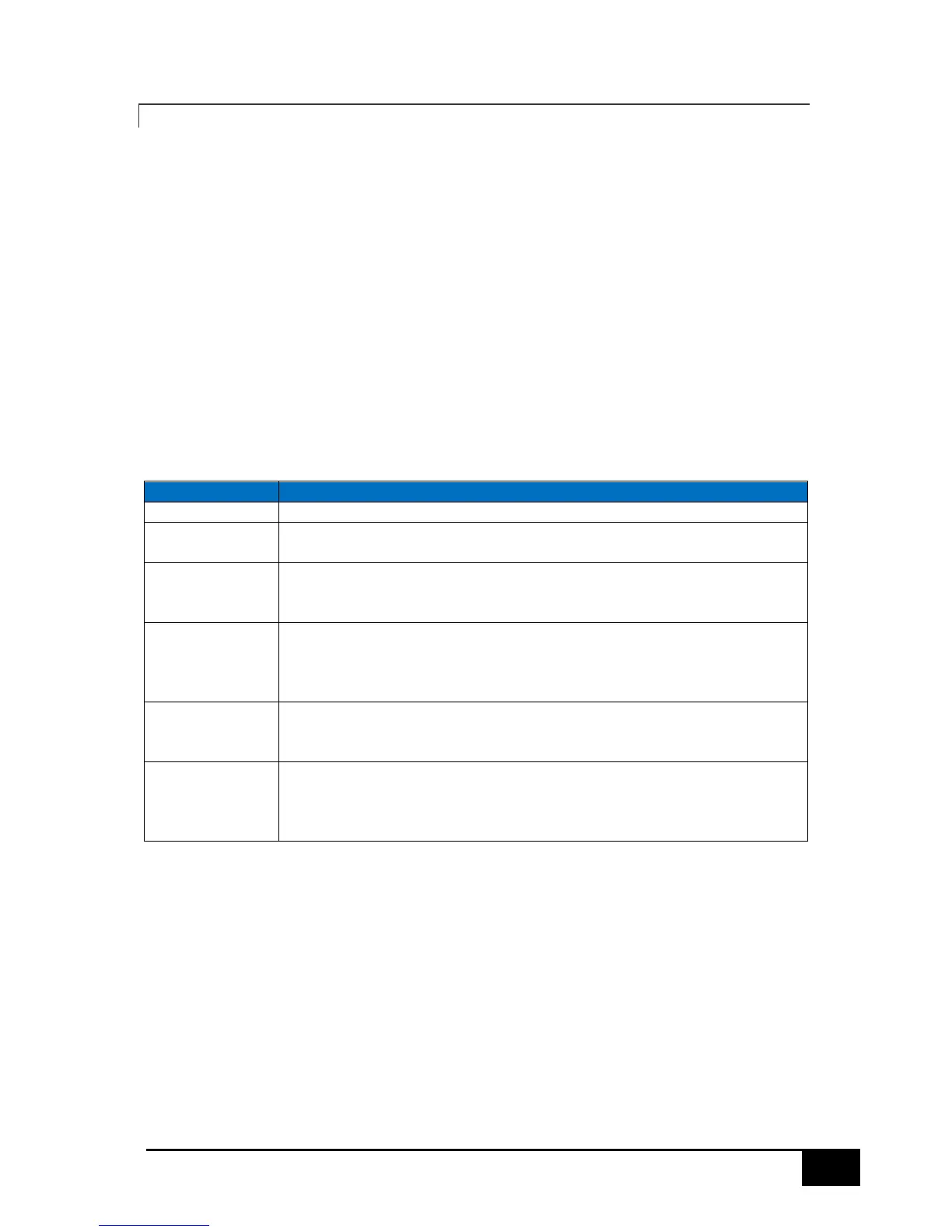
The $PENCR data string includes up to 5 encoder values:
$PENCR,Value1,Value2,Value3,Value4,Value5<CR><LF>
$PENCR,3FFF,2000,0FA0,0000,0000 = 90˚ rotation, 45˚ first knuckle angle, 22˚ second knuckle angle
Value1 is the encoder for the Z-axis/yaw/base rotation. I.e. typically the
complete crane rotation. Data with the resolution 360°/65536
Value2 is the encoder for the first knuckle or telescopic arm. When it is being
used as a knuckle the data with the resolution 360°/65536 is being entered. If
it is a distance being returned from the crane it is in the format 0 – 65535 cm
Value3 is the encoder for the second knuckle or telescopic arm. When it is
being used as a knuckle the data with the resolution 360°/65536 is being
entered. If it is a distance being returned from the crane it is in the format
0 – 65535 cm
Value4 is the encoder for the third knuckle or telescopic arm. When it is being
used as a knuckle the data with the resolution 360°/65536 is being entered. If
it is a distance being returned from the crane it is in the format 0 – 65535 cm
Value5 is the encoder for the fourth knuckle or telescopic arm. When it is
being used as a knuckle the data with the resolution 360°/65536 is being
entered. If it is a distance being returned from the crane it is in the format
0 – 65535 cm
Description of the encoder values:
The encoder readings are sent in an Unsigned 16 bit.
The values are in hexadecimal format 0 to 65535 = 0x0000 …0xFFFF representing 0° - 360°.
If an encoder input is set to be used as Telescopic in the IMU Configuration software, the given
encoder value represents a distance value.
The length of a telescopic arm is given in the range of values:
Unsigned 16 bit; values in hexadecimal format 0…65535 = 0x0000 …0xFFFF representing 0 – 65535
cm.
If one rotational point is not being used or is not available input 0 or leave the position blank in the
PLC string.
 Loading...
Loading...

