Home
SMC Networks
Accessories
IMU-108
Page 49 (Psmcm)
SMC Networks IMU-108 - Psmcm
114 pages
Manual
To Next Page
To Next Page
To Previous Page
To Previous Page
Loading...
49
IMU User Guide revi
sion 3.1
SMC Ship Motion Contr
ol w
ww.shipmotion.eu
4
.
2
.
1
2
P
SM
CM
Data Frame
$PSMCM,+xx.xx,+
yy.yy,+zzz.z,+ss.ss,+w
w.ww,+hh.hh,+xv.xv,+y
v.yv,+zv.zv,+ax.ax
a,+ay.aya,+az.aza*cs
<CR><LF>
Example
$PSMCM,-14.36,-2
1.70,+340.0,-00.01,+0
0.01,+00.07,-64.80,-19.
89,-44.16,+00.04
7,+00.254,-
02.008*7C
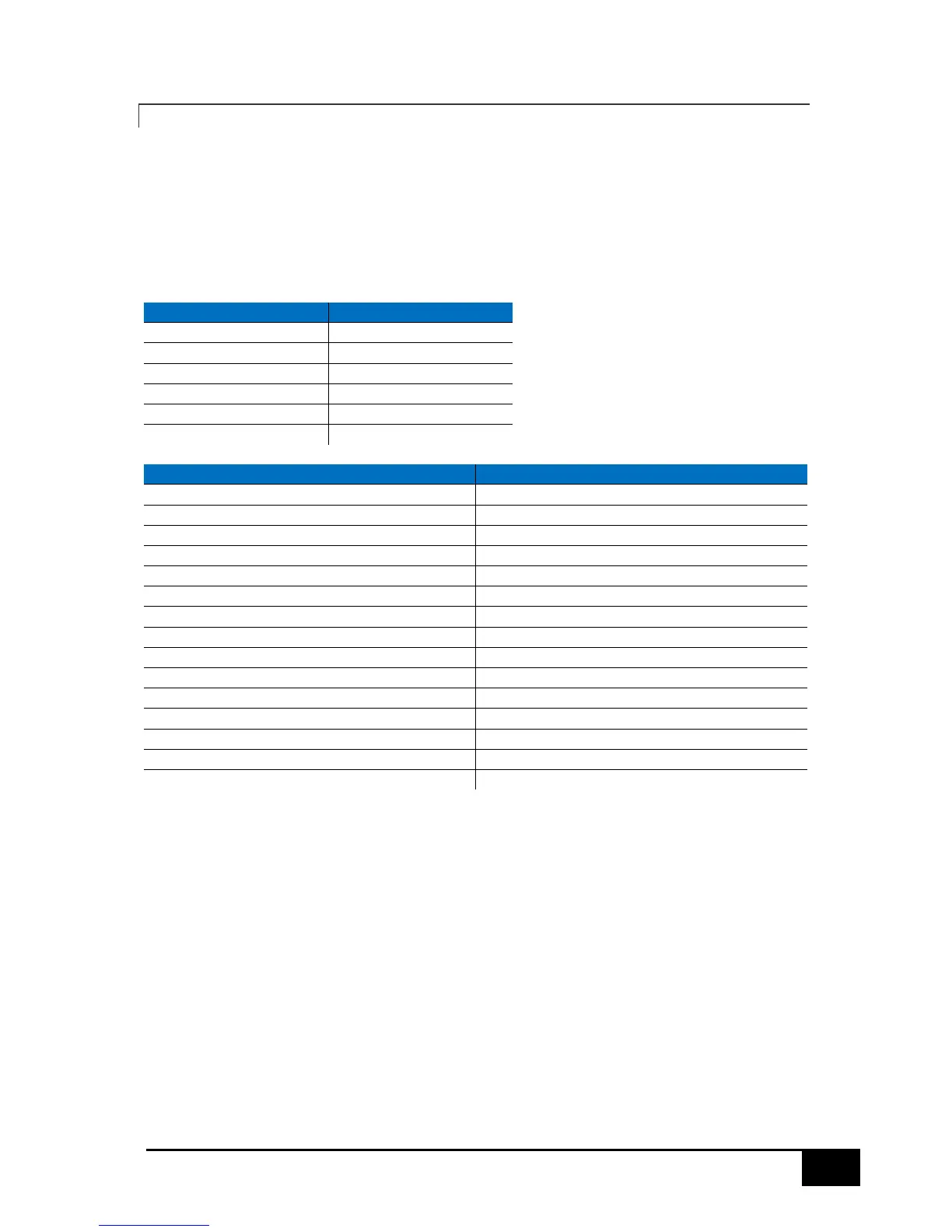
Bitrate
Max output Rate
115200
100
57600
56
38400
37
19200
18
9600
9
4800
4
Description
Form
Start Characters
$PSMCM
Roll Angle (xx.xx)
Degrees Resolution
0.01° (+ve=port up)
Pitch Angle (yy.y
y)
Degrees Resolution
0.01° (+ve=bow down)
Yaw (zz.zz)
Degrees Resolution
0.
1°
Surge (ss.ss)
Meters Resolution 0.0
1m
Sway (ww.ww)
Meters Resolution 0.0
1m
Heave (hh.hh)
Meters Resolution 0.0
1m
Roll Velocity (xv.
x
v)
Degrees/second Re
solution 0.01°/s
Pitch Velocity (y
v.y
v)
Degrees/second Re
solution 0.01°/s
Yaw Velocity (zv.z
v)
Degrees/second Re
solution 0.01°/s
Acceleration X (a
x.axa)
Meters/second
2
Resolution 0.001 m
/s²
Acceleration Y
(a
y
.a
y
a)
Meters/second
2
Resolution 0.001 m
/s²
Acceleration Z
(a
z.az
a)
Meters/second
2
Resolution 0.001 m
/s²
Checksum (cs)
XOR checksum
Termination Charact
ers
<CR><LF>
48
50
Table of Contents
Main Page
Default Chapter
3
Table of Contents
3
1 Introduction
6
Receiving the Motion Sensor
7
2 System Description
8
Spatial Movement - Coordinate System
9
Definitions
12
3 Installation
13
Location
13
Mounting Instructions
14
Mounting Bracket - Optional
15
Alignment
16
Deck Mounted - Mounted on Horizontal Surface
16
Sideways Mounting
17
Top of the Motion Sensor Pointing to the Bow
17
Top of the Motion Sensor Pointing to the Starboard
18
Top of the Motion Sensor Pointing at the Stern
18
Top of the Motion Sensor Pointing to the Port
19
Motion Sensor Dimensions
20
IMU-00X Surface Motion Sensor
20
IMU-00X 30M Depth Rated Motion Sensor
21
IMU-10X Surface Motion Sensor
22
IMU-10X 30M Depth Rated Motion Sensor
23
IMU Mounting Bracket Optional
24
Electrical Communication
25
Surface Motion Sensor Cable Connection
26
Depth Rated Unit
27
Surface Motion Sensor Hardware Version up 8.4
28
Surface Motion Sensor Hardware Version Higher than 8.5
29
Depth Rated Motion Sensor
30
Analog Outputs Voltage +/-10V
31
Analog Outputs Current 4-20Ma
32
IMU Junction Box Without Power Supply and Serial Input
32
4 Motion Sensor Configuration Guide
33
Imu Configuration Software
33
Default Settings at the Factory
34
General Settings & Setup Tab
35
Serial Ascii Protocols
37
Psmca
38
Psmcb
39
Psmcc
40
Psmcd
41
Psmce
42
Psmcf
43
Psmcg
44
Psmch
45
Psmci
46
Psmcj
47
Psmck
48
Psmcm
49
Psmcr
50
Psmcs
50
Psmct
51
Smcu
51
Psmcv
52
Dd50
53
Tcm2
54
Trh
55
Tro
56
Mdl
56
Digilog / Ocean Tools
57
Cdl Microtilt
57
Cdl1
58
Tss1
59
Tss3
60
Prdid
61
PRDID with Checksum
62
Sxn
63
Binary Protocols
64
ATLAS (Hydrographic)
64
Simrad Em1000 & Em3000
65
Bosch Rexroth Hexadecimal Heave
66
Binary String 2
67
Binary Output Message 4
68
Analog Outputs
70
ANALOG1 ±10V, Heave ±0.5M, Heave Rate ±0.2M/S, Heave Acc 0.1M/S2
70
ANALOG2 ±10V, Roll ±10°, Pitch ±10°, Heave ±10M
70
ANALOG3 ±10V, Roll ±30°, Pitch ±30°, Heave ±10M
70
ANALOG4, 4~20Ma, Roll 0-20°, Pitch 0-20
71
ANALOG5, 4~20Ma, Heave ±6M, Pitch ±60°, Roll ±60°, STATUS
71
ANALOG6 ±10V, Heave ±5M, Heave Rate ±5M/S, Heave Acc 5M/S2
71
ANALOG7 4~20Ma, Heave ±5M, Heave Rate ±5M/S, Heave Acc 5M/S2
72
Ethernet
73
IP Settings
74
Port Settings
75
Target IP Addresses
75
Network Scan
76
Windows Firewall
77
Ethernet Protocols
78
Checksum Calculation
78
SMC Ethernet Protocol 1 UDP
78
ABB Smartwinch MODBUS TCP
80
Data Types for MODBUS Protocol
83
Charts
84
Serial Input
85
Aiding Via GPS and Speed Log
86
Heading Input
87
Remote Heave Tab
88
Remote Heave
89
Lever Arm
91
AHC - Active Heave Compensation
93
Crane
94
Crane Zero Positions and Offsets
94
IMU Mounted on the Crane Base
94
IMU Mounted on the Vessel
95
Setting Crane Distance & Angle Offsets
96
Telescopic Arm Input Data
98
Crane Booms
100
String Input
101
Verification String and Example Strings
103
Time
104
Received Data
105
Optional Smc Software
106
5 Motion Sensor Operation
107
Settling Time
107
Heave Operation
107
6 Service and Warranty
108
Technical Support
108
Warranty
109
Limit of Liability
109
Restriction of Warranty
110
7 Technical Specifications
111
Imu-00X Technical Specifications
111
Imu-10X Technical Specifications
112
8 Faq & Support
113
Related product manuals
SMC Networks IMU-007
114 pages
SMC Networks SMCGB10-Z
9 pages
SMC Networks D-MP Series
32 pages
 Loading...
Loading...

