4.8.2 HEADING INPUT
When a heading input is connected, the motion sensor will use the heading for aiding the yaw signal,
combining the data from internal gyros in the motion sensor with the input from the external
compass. The heading output is available in strings where yaw or heading is available
The accepted strings for heading inputs are $xxHDT and $xxHDG.
Heading can also be retrieved from the GPS string but is not advisable if the vessel is not under
constant motion unless a dual head GPS antenna is being used. The $GPHDG string is not accepted as
default for the heading input. To use the GPS heading data for yaw aiding tick the Use GPS heading
input for yaw aiding if available checkbox in the Serial Input tab otherwise the $GPHDG string will be
ignored.
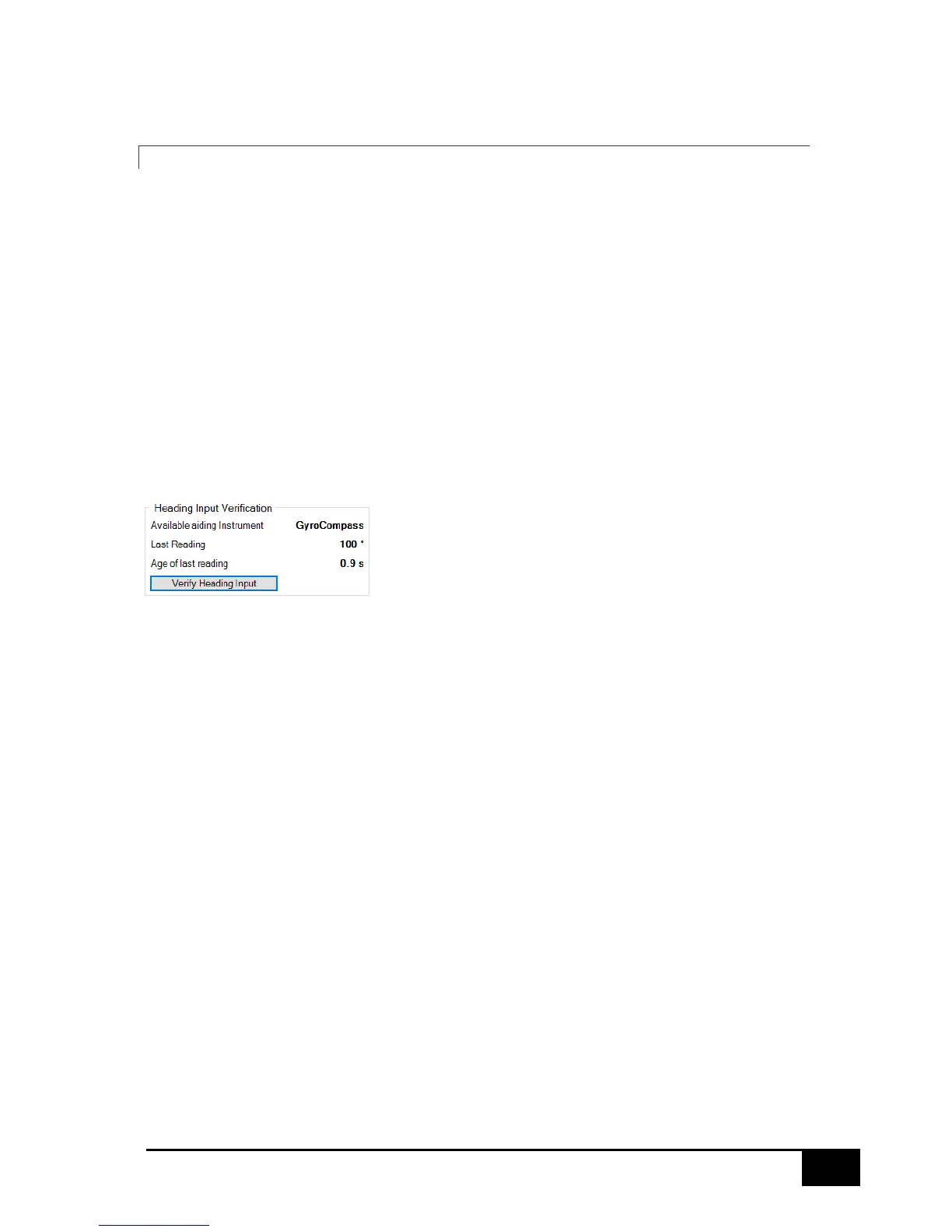
To confirm that the motion sensor is receiving data from the heading device click the Verify Heading
Input button on the Serial Input tab. The IMU replies with the time since the last reading and the
heading received. If N/A is displayed when clicking the button, the heading input is not working.
 Loading...
Loading...

