Remote heave X is the fore aft distance in meters between the Motion Sensor and the remote heave
point. Where a positive distance represents that the remote heave measurement point is located
fore of the Motion Sensor physical location.
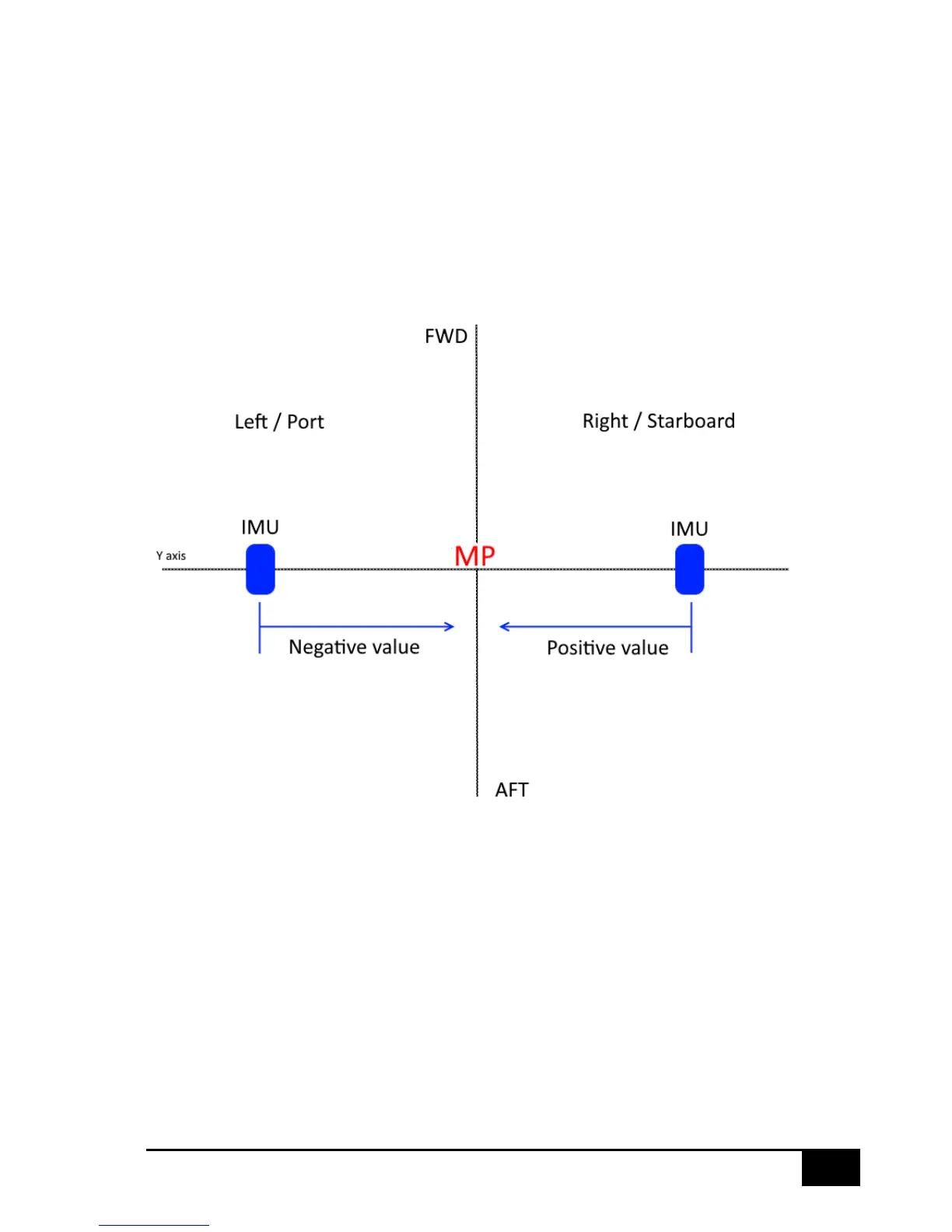
Remote heave Y is the sideways distance in meters between the Motion Sensor and the remote
heave point. Where a positive distance represents that the remote heave measurement point is
located to the port of the Motion Sensor physical location.
The drawing below illustrates the principle
Remote heave Z is the vertical distance in meters between the IMU and the remote heave point.
Where a positive distance represents that the remote heave measurement point is located above the
Motion Sensor physical installation location.
 Loading...
Loading...

