23
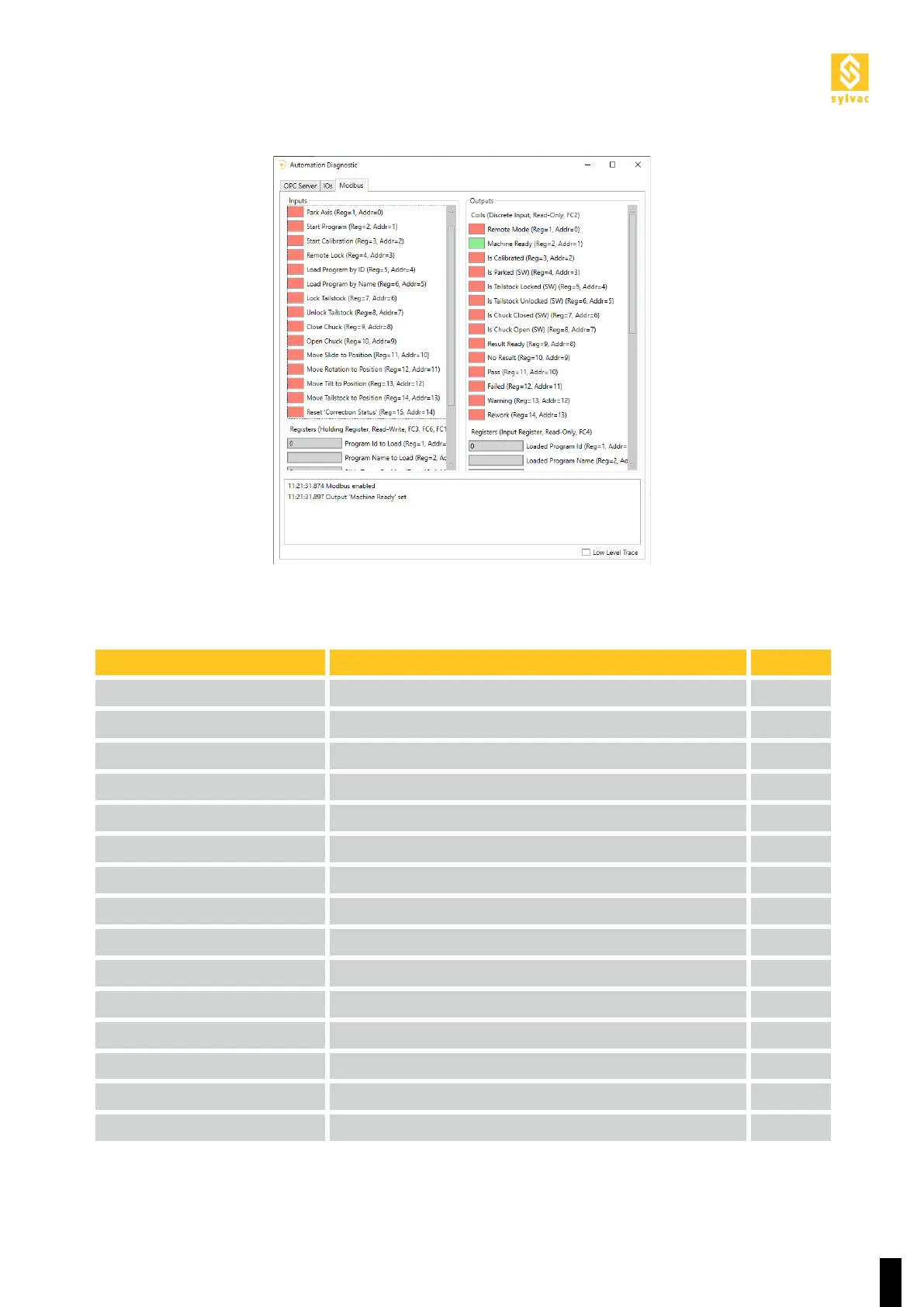
7.2 Diagnostics
7.3 Input table (Coils, Read-Write, FC1, FC5, FC15)
Variable Description Address
Park Axis Moves the machine in the parking position 0
Start Program Start the measurement of the part 1
Start Calibration Start the calibration of the machine 2
Remote Lock Lock remotely from the scan (e.g.: robot is working) 3
Load Program by Id Load a program using its ID 4
Load Program by Name Load a program using its name 5
Lock Tailstock Lower the tailstock to clamp the part 6
Unlock Tailstock Raise the tailstock to release the part 7
Close Chuck Closes the chuck to clamp the part 8
Open Chuck Opens the chuck to release the part 9
Move Slide to Position Moves the slide to the desired position 10
Move Rotation to Position Moves the rotation to the desired position 11
Move Tilt to Position Moves the tilt to the desired position 12
Move Tailstock to Position Moves the tailstock to the desired position 13
Reset ‘Correction Status’ Reset the status of the corrector 14