6
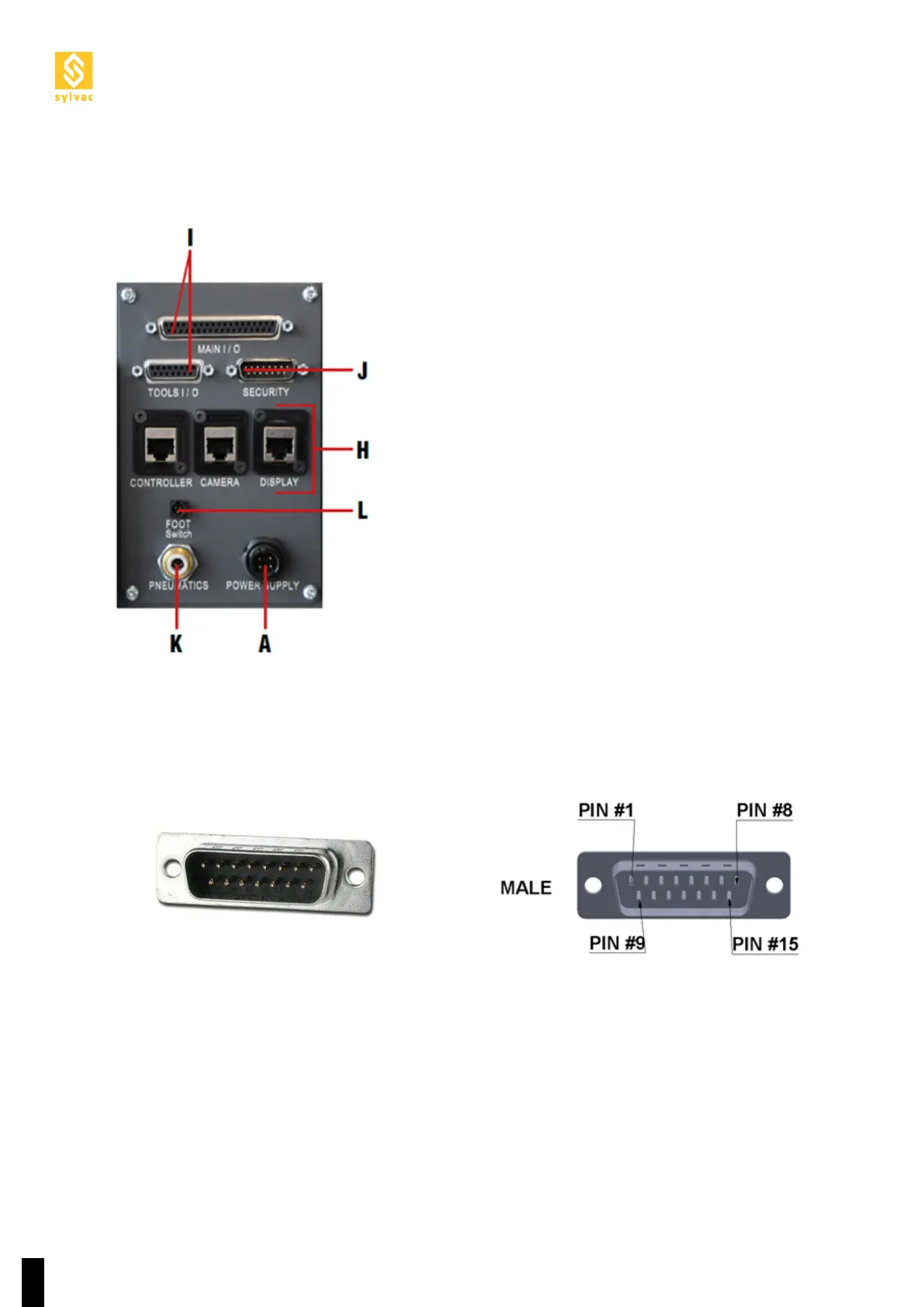
2.3.Connections of the Scan S25
2.4 Description of the D-SUB 15p safety connector
A. Main power supply
H. Ethernet plug CTRL, CAMERA and Display
I. I/O connectors
J. Security connector
K. Pneumatic input
L. Footswitch input
All inputs and outputs, to and from the Scan, must either be at +24V (binary 1) or at GND (binary 0). All signals
to the Scan must come from the robot.