116 Chapter 7 - Parameters Description User Manual
PID
A.001
PID refence selector
Null = 0
Analog input1=1
Analog input2=2
Analog input3=3
Frequency ref = 4
Ramp output = 5
Digital ref = 6
Encoder frequency = 7
A.001
Reference
A.002
Feed-back
A.002
PID feedback
Null = 0
Analog input1=1
Analog input2=2
Analog input3=3
Encoder freq. = 4
Output curr = 5
Output torque = 6
Output power = 7
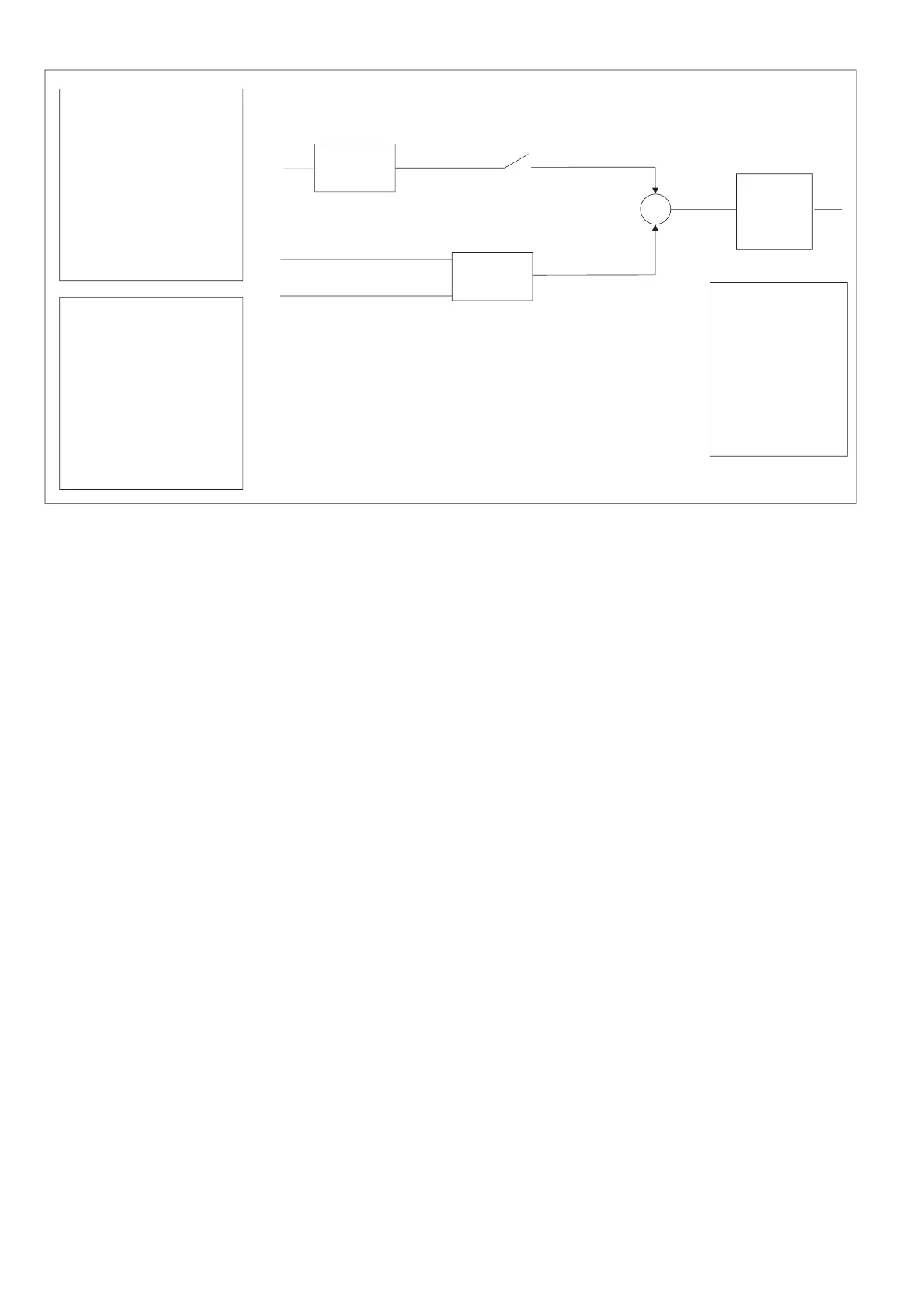
A.000 = 4
( whitout feed-forward)
A.000
PID mode
Disable = 0
Freq. sum = 1
Freq. direct = 2
Volt sum = 3
Volt direct = 4
Stand alone = 5
St-stand alone = 6
+
-
V/F
Figure 7.7.3: PID Mode as Voltage Sum or Direct
A.001 PID reference selector
It defines and selects the source, from where the PID reference signal is provided and controlled.
A.001 = 0 Null Null
A.001 = 1 Analog inp 1 PID Reference connected to Analog input 1
A.001 = 2 Analog inp 2 PID Reference connected to Analog input 2
A.001 = 3 Analog inp 3 PID Reference connected to Analog input 3
A.001 = 4 Frequency ref PID Reference connected to Frequency reference
A.001 = 5 Ramp output PID Reference connected to Ramp output signal
A.001 = 6 Digital ref PID Reference connected to PID digital refparameter
A.001 = 7 Encoder freq PID Reference connected to Encoder frequency
A.002 PID Fbk sel (PID feedback selector)
It defines and selects the source, from where the PID feed-back signal is provided and controlled.
A.001 = 0 Null Null
A.001 = 1 Analog inp 1 PID Feed-back connected to Analog input 1
A.001 = 2 Analog inp 2 PID Feed-back connected to Analog input 2
A.001 = 3 Analog inp 3 PID Feed-back connected to Analog input 3
A.001 = 4 Encoder freq PID Feed-back connected to Encoder frequency
A.001 = 5 Output curr PID Feed-back connected to Output current signal
A.001 = 6 Output torque PID Feed-back connected to Output torque signal
A.001 = 7 Output power PID Feed-back connected to Output power signal
A.003 PID digital ref (PID digital reference)
Setting of the reference for the PID function.
It will be active only if PID Fbk sel (A.002) is set as 6
A.004 PID activate mode
It defines if the PID function has to always be enabled or if it has active in steandy state only.
A.004 = 0 Always The PID function is always enabled.
A.004 = 1 Steady state The PID function is enabled only at steady state.