Technosoft 2019 11 iPOS360x VX-CAN/CAT Technical Reference
• Position, Time (PT) 1
st
order interpolation
• Cyclic Synchronous Position (CSP) for CANopen mode and EtherCAT® drives.
• Cyclic Synchronous Velocity (CSV) only for EtherCAT® drives.
• Cyclic Synchronous Torque (CST) only for EtherCAT® drives.
• Electronic gearing and camming
• 35 Homing modes
• Software CAN selectable addresses
• Two CAN operation modes selectable by HW pin (only for CAN drives):
• CANopen – conforming with CiA 301 v4.2 and CiA DSP 402 v3.0
• TMLCAN – intelligent drive conforming with Technosoft protocol for exchanging TML commands via
CAN-bus
• EtherCAT® with CAN application protocol over EtherCAT (CoE) for CAT drives
• 2K × 16 internal SRAM memory for data acquisition
• 4K × 16 E
2
ROM to store TML motion programs, cam tables and other user data
• Operating ambient temperature:
• 0-70°C – iPOS360X VX-CAN
• 0-40°C – iPOS360X VX-CAT
• Protections:
• Short-circuit between motor phases
• Short-circuit from motor phases to ground
• Over-voltage
• Under-voltage
• Over-current
• Communication error
• Control error
• Over-temperature
• Firmware on drive:
• F508M+ or F523E+ for iPSO3604
• F509M+ or F524E+ for iPSO3602
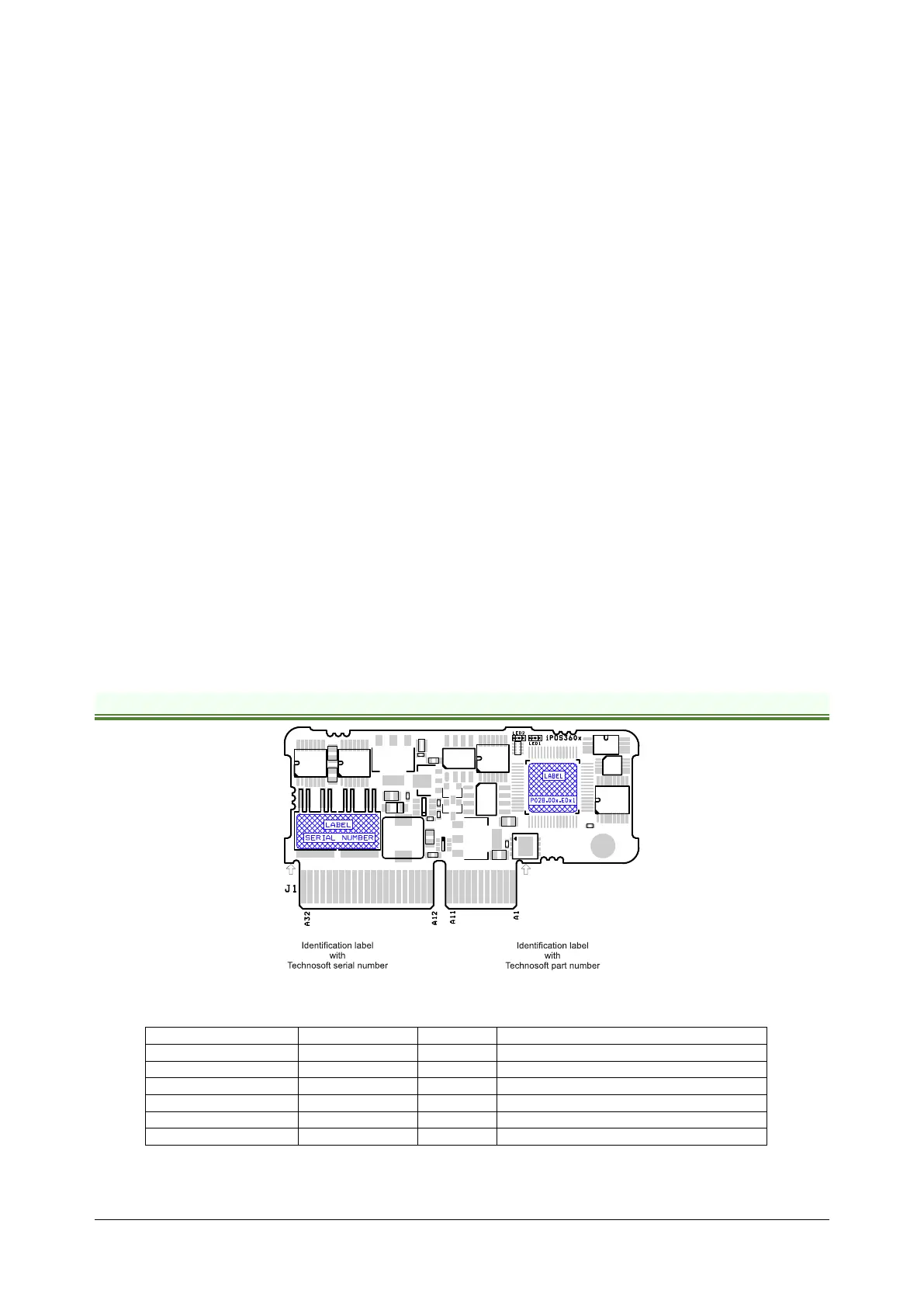
2.3 Identification Labels
Figure 2.3.1. iPOS360X VX-CAN identification labels
The iPOS360X VX can has the following part number and name on the identification label:
Standard version + Linear Hall, EtherCAT
Standard version + Linear Hall, EtherCAT