Technosoft 2019 43 iPOS360x VX-CAN/CAT Technical Reference
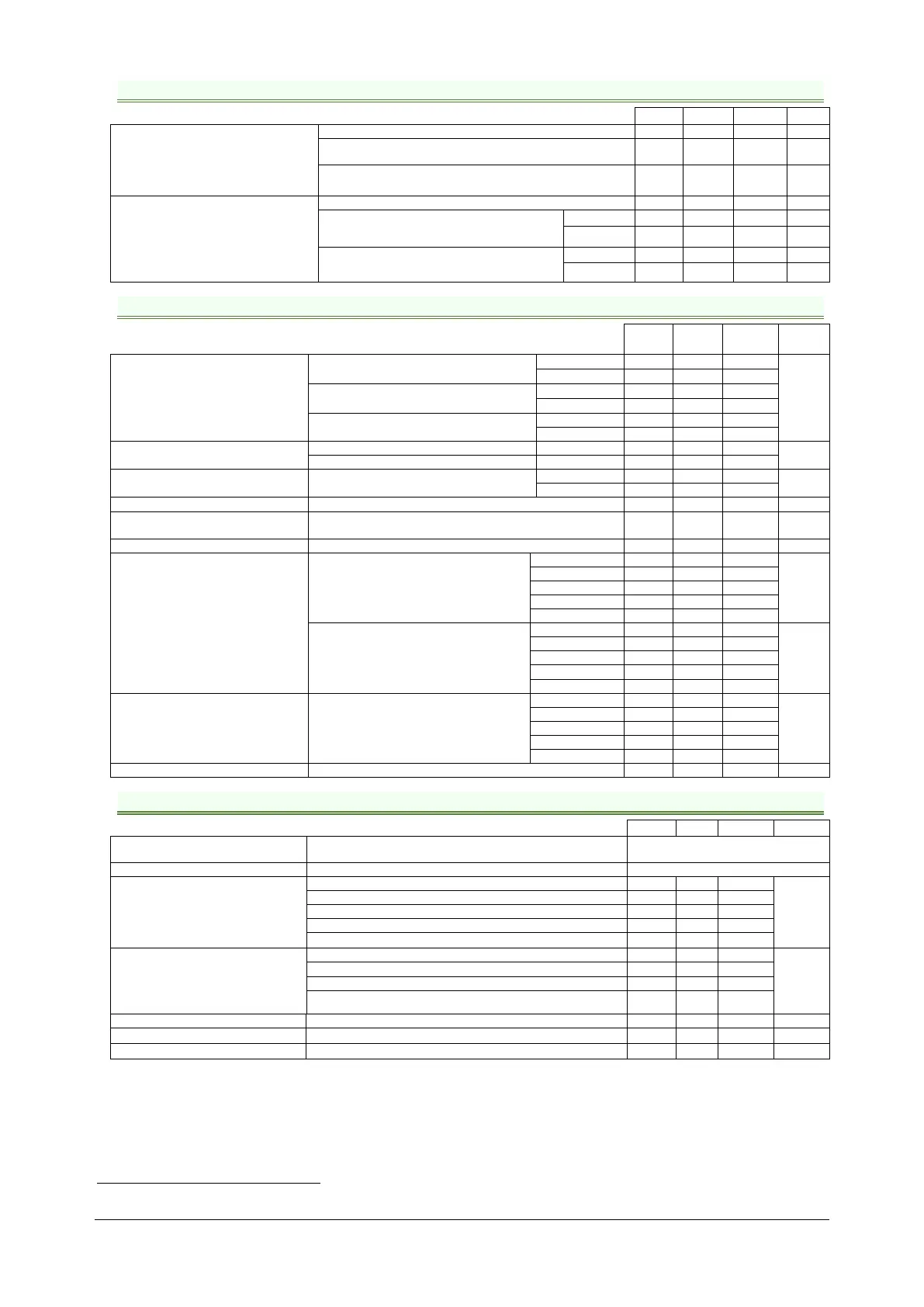
3.10.6 Motor Supply Input (+V
MOT
)
Supply voltage
Absolute maximum values, drive operating but outside
guaranteed parameters
8.5 40 V
DC
Absolute maximum values, surge
(duration ≤ 10ms)
†
-1 45 V
Supply current
Operating
A
Absolute maximum value, short-circuit
condition (duration ≤ 10ms)
†
A
3.10.7 Motor Outputs (A/A+, B/A-, C/B+, BR/B-)
Min. Typ. Max. Units
Nominal output current, continuous
for DC brushed, steppers and BLDC
motors
with Hall-based trapezoidal control
A
for PMSM motors with FOC sinusoidal control
(sinusoidal amplitude value)
for PMSM motors with FOC sinusoidal control
(sinusoidal effective value)
Motor output current, peak
A
Short-circuit protection threshold measurement range
A
Short-circuit protection delay
On-state voltage drop
Nominal output current; including typical mating connector
contact resistance
±0.3 ±0.5 V
Off-state leakage current
Motor inductance (phase-to-phase)
Recommended value, for
measurement range; +V
MOT
= 36 V
µH
Absolute minimum value, limited by short-
circuit protection; +V
MOT
= 36 V
µH
Motor electrical time-constant (L/R)
Recommended value, for ±5% current
measurement error due to ripple
µs
Current measurement accuracy
3.10.8 Digital Inputs (IN0, IN1, IN2/LSP, IN3/LSN, IN4/Enable)
1
Mode compliance
TTL / CMOS / LVTTL (3.3V) / Open-
collector / NPN / 24V outputs
Input floating (wiring disconnected)
Input voltage
V
Floating voltage (not connected)
Absolute maximum, continuous
Absolute maximum, surge (duration ≤ 1s)
†
Input current
Logic “LOW”; Pulled to GND
mA
Logic “HIGH”; Internal 4.7KΩ pull-up to +3.3
Logic “HIGH”; Pulled to +5V
Logic “HIGH”; Pulled to +24V 2 2.5
1
The digital inputs are software selectable as PNP or NPN