AC Induction Motor Example
AC Induction Motor Example
AC Induction Motor Example
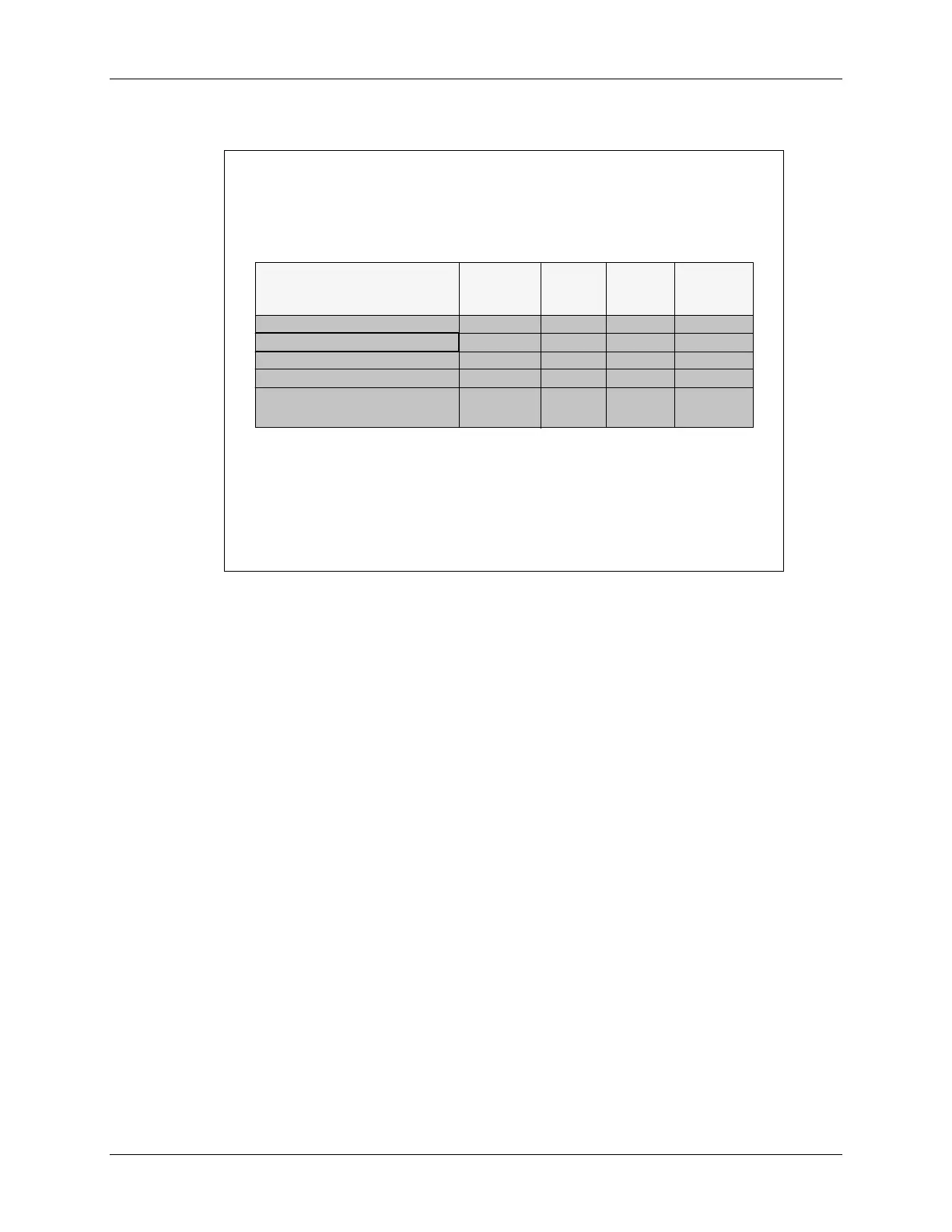
Performance comparisons
Performance comparisons
Notes: C28x compiled on CGT V3.03, V1.4c IQmath Lib (debug enabled (-g), max opt).
C3x compiled on CGT V5.12, RTS30R Lib (debug enabled (-g), max opt).
C67x compiled on CGT V4.20, RTSFast Lib (debug enabled (-g)/disabled, max opt).
On C67x, when debug is enabled (-g), parallel execution of operations are limited.
On C28x & C3x, turning off debug (no –g) has minimal impact on performance.
B1: Forward control cycles
B1: Forward control cycles
Key benchmark cycles (B1+B3)
Key benchmark cycles (B1+B3)
% of available MHz used
% of available MHz used
(20kHz control loop)
(20kHz control loop)
B2: ACI model cycles
B2: ACI model cycles
B3: Feedback control cycles
B3: Feedback control cycles
Benchmark
Benchmark
20.9%
20.9%
1563
1563
1081
1081
564
564
482
482
C28x C
C28x C
IQmath
IQmath
(
(
-
-
g)
g)
(150MHz)
(150MHz)
30.3%
30.3%
1137
1137
829
829
215
215
308
308
C3x C
C3x C
float (
float (
-
-
g)
g)
(75MHz)
(75MHz)
23.0%
23.0%
1922
1922
1295
1295
321
321
627
627
C67x C
C67x C
float (
float (
-
-
g)
g)
(167MHz)
(167MHz)
16.8%
16.8%
1405
1405
973
973
183
183
432
432
C67x C
C67x C
float (no
float (no
–
–
g)
g)
(167MHz)
(167MHz)
Using the profiling capabilities of the respective DSP tools, the table above summarizes the num-
ber of cycles and code size of the forward and feedback control blocks.
The MIPS used is based on a system sampling frequency of 20kHz, which is typical of such sys-
tems.
8 - 32 C28x - Numerical Concepts & IQmath
 Loading...
Loading...




