UHP SCPC MODEM
USER MANUAL, v3.2
© ROMANTIS 2015 33 www.uhp.net
6. COMMUNICATIONS ON THE MOVE (COTM)
UHP routers with mobile antennas can be used for Communications On The Move (COTM). The router uses
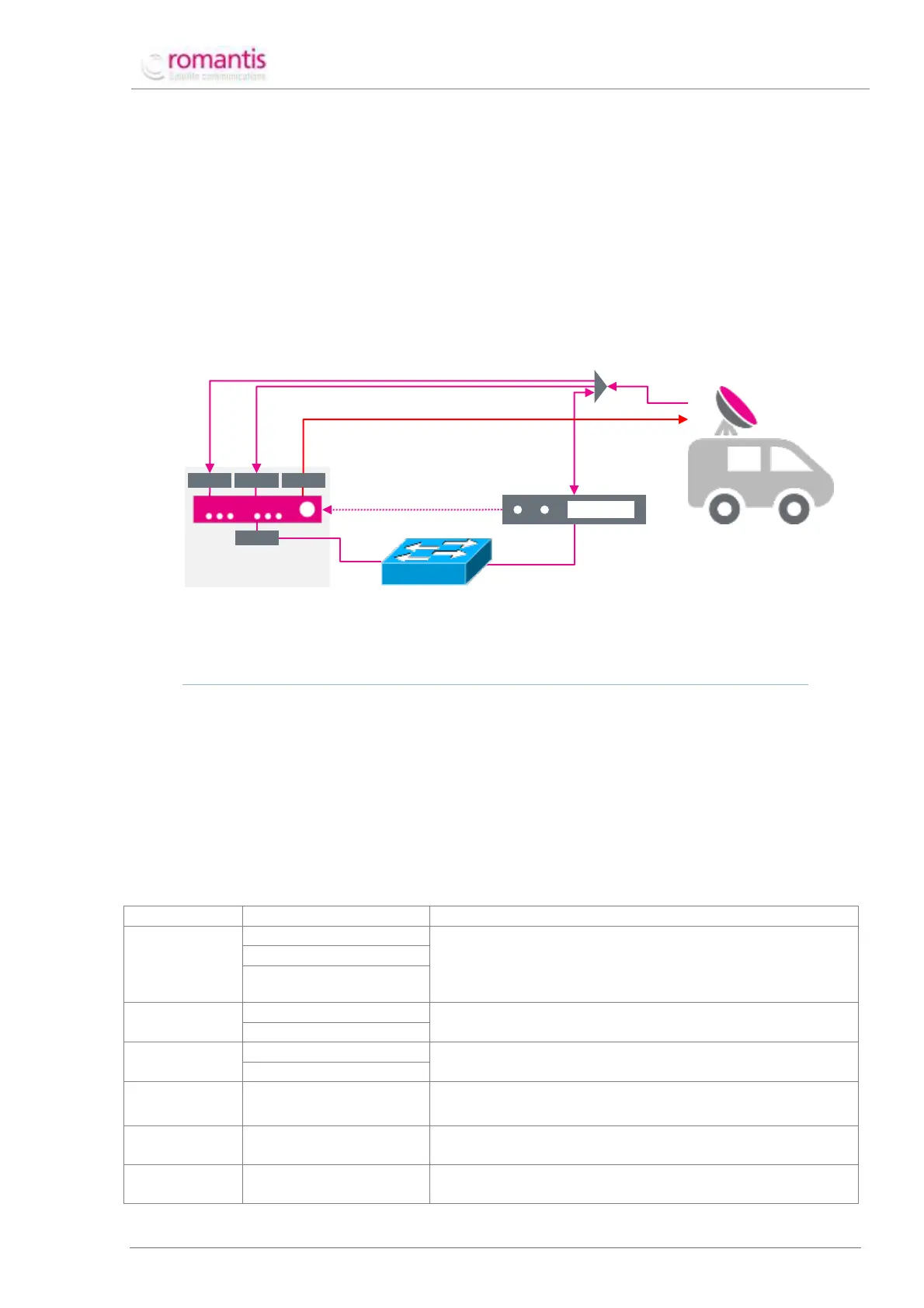
OpenAMIP protocol to communicate with a mobile antenna controller (see Figure 37). UHP routers with Automatic
Beam Switching allow reconfiguring the mobile antenna to the most suitable satellite depending on current
location of the COTM Station. UHP router and antenna controller exchange the following information:
Overall level on SCPC Rx interface (for controller);
Level of the locked TDM or SCPC carrier (for controller);
Current geographic location of the Station (for UHP);
Permission to transmit (for UHP).
Figure 37 COTM Station structure
DO NOT CONNECT OR DISCONNECT ANY CABLES OF THE ROUTER WHEN IT IS POWERED ON. THIS CAN LEAD TO FAILURE
OF THE ROUTER OR OF THE OTHER CONNECTED DEVICES.
6.1 OpenAMIP Protocol
OpenAMIP protocol specifies communication between the mobile antenna controller and the satellite router. It
allows the router to manage the controller while searching for the desired satellite. OpenAMIP allows the router
and the controller to exchange information in order to establish and keep satellite connectivity.
OpenAMIP messages are transmitted as ASCII-characters in a readable format. The message consists of one or
more fields of variable length separated by spaces. The first field specifies the type of message. Each command has
a certain number of parameters.
Table 3 OpenAMIP commands
Satellite longitude, maximum excursion (for inclined orbit
satellites) and nominal polarization offset (for skewed
polarization). Router expects antenna to use this satellite when
commanded.
Defines polarization for receive and transmit paths:
“H”-horizontal; “V”-vertical; “L”-left; “R”-right.
Router expects antenna to use this hunt central frequency and
band when commanded.
float RX lo freq, MHz
float TX lo frequency, MHz
Local oscillator Rx down- and Tx up-conversion frequency.
Find the satellite with use of previously specified S, P, H, B
parameters.
Keep-alive time. Antenna should send a status message at least
this frequently.
• Motors control
• GPS