B1 User Manual
© 2022 All rights reserved, Unitree Robotics 8
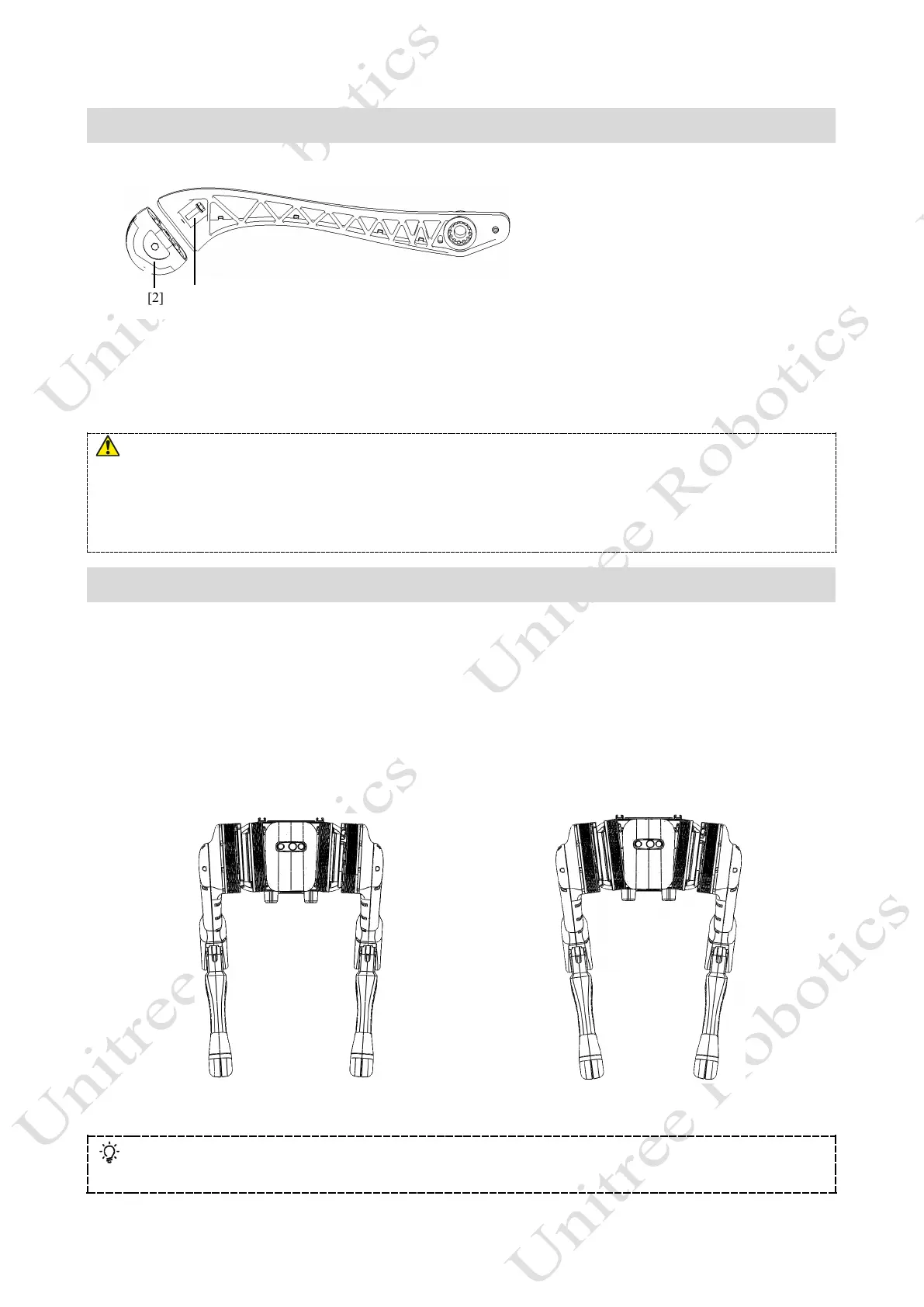
Foot End Components Description
[1] Tightening screw at the end of foot
[2] Rubber Foot Pad
The foot component adopts a new design: the foot of the quadruped robot is the first to contact the physical world,
which greatly affects the movement performance and reliability of the robot. The B1 foot pad is made of high molecular
weight elastic rubber material, which can not only buffer the impact when the foot is in contact with the ground, but also
ensure a long life when used on rough ground. In the event of severe abrasion or damage, it can be quickly replaced.
The foot component is a consumable, and its life span is usually 2-6 months (depending on the frequency, duration and
working condition). Abrasion will be more serious, especially when it runs on the rough ground. If it is found that the foot
pads are obviously worn out or damaged, or the impact noise of the robot on the ground is significantly increased when
walking, please replace the foot end components in time to avoid damage to the foot end and cause the robot to move
abnormally.
Load Function Description
The B1 has a very large load capacity, with a maximum standing load of 80kg and a continuously working load of
20kg. When the robot load is relatively large, the height of the robot's standing and walking will become shorter, which
will adversely affect the heating of the knee motor. At present, the height of the robot should be raised, which can be
realized by "up" and "down" buttons on the remote control. At the same time, the footholds of the legs also need to make
adjustment by pressing R2+A/B to switch between two different footholds. When the load is relatively large, it should
be switched to the foothold state as shown in Figure 2, which will sacrifice some extreme movement performance to
reduce the heat of the motor on the robot.
please reduce the speed appropriately and run carefully!
In the process of carrying the load, it is recommended that the weight be controlled within 20kg.
[1]