A.3. GUI
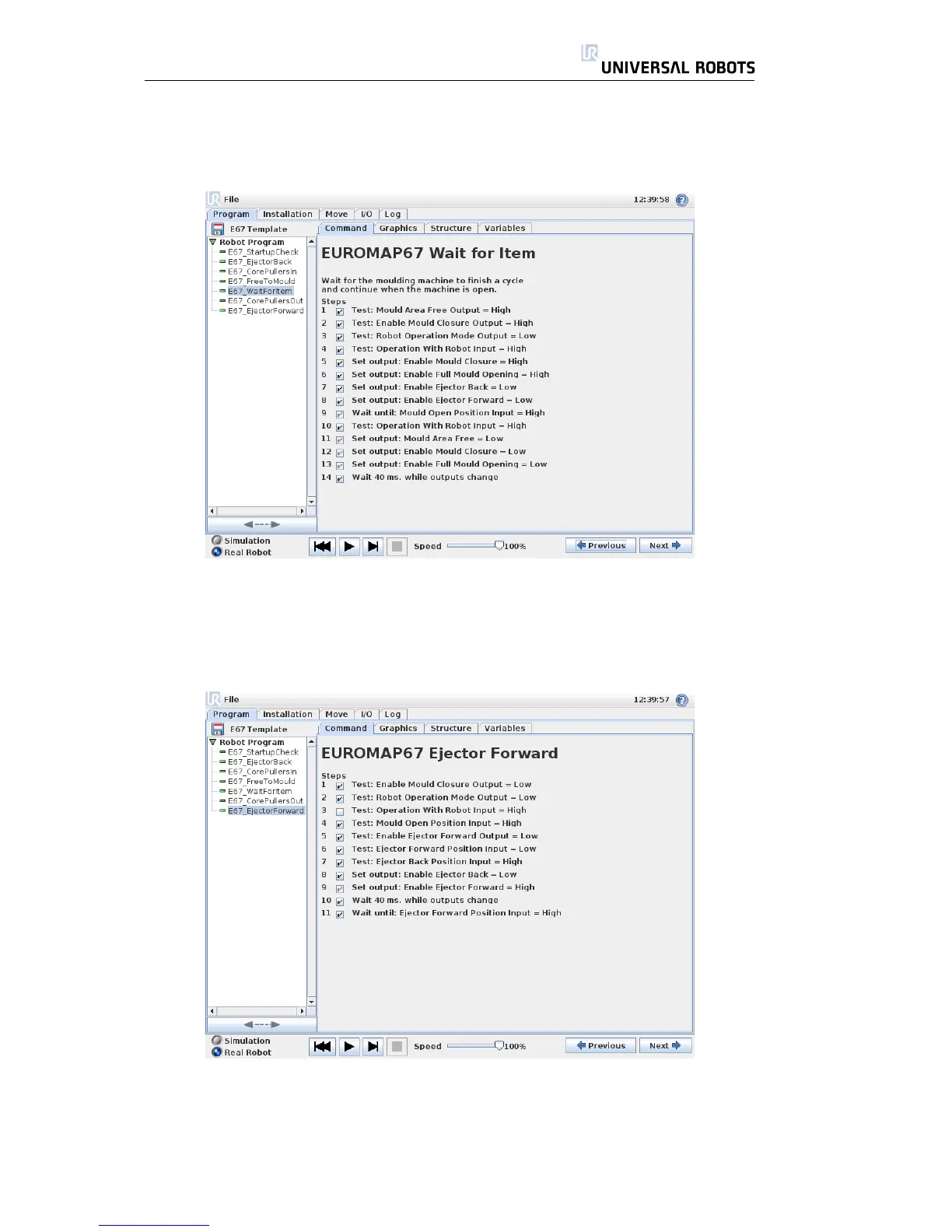
Wait for Item
Intended for making the robot wait until an item is ready from the IMM. Use the
checkboxes to enable/disable individual steps.
Ejector Forward
Enables the movement of the ejector which removes an item from the mould.
Should be used when the robot is in position ready for grasping the item. Use
the checkboxes to enable/disable individual steps.
Ejector Back
Enables the movement of the ejector to its back position. Use the checkboxes
to enable/disable individual steps.
All Rights Reserved
51 UR10

 Loading...
Loading...









