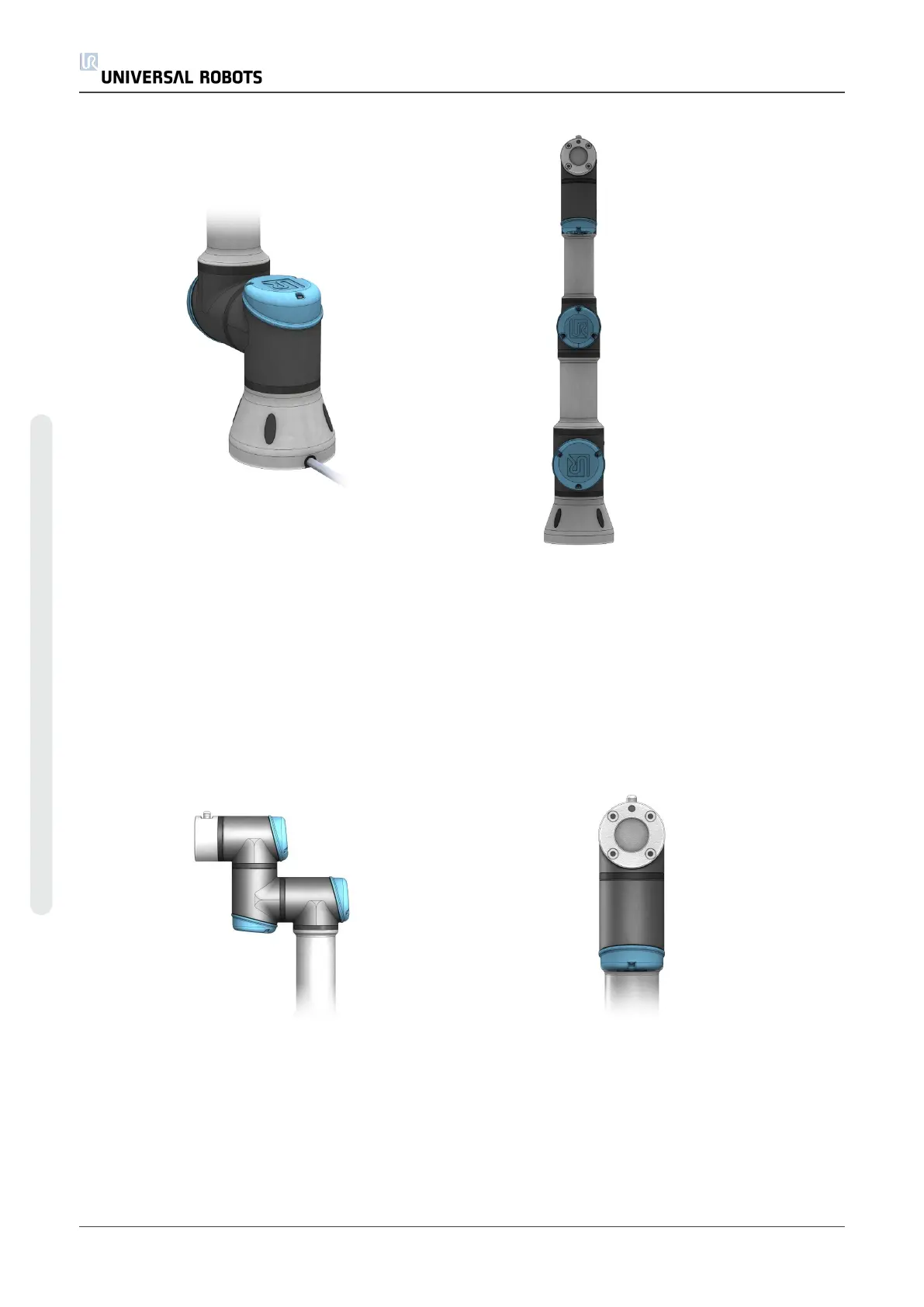
Base zero position is aligned so that the
output flange is offset 180 degrees from the
cable at the back of the robot base.
Shoulder, Elbow and Wrist 1 zero output
flange vertically aligned (assuming Base is
horizontal).
Make sure that base of robot is horizontal, use
spirit level to align joints.
Wrist 2: Wrist 3:
Wrist 2 zero position is aligned similar to
Base joint, with tool flange parallel with wrist
1 output flange.
Wrist 3 zero position is aligned so tool
connector is pointing upward.
Mount two bolts in tool holes and use spirit
level to align joint.
10. Select Calibration tab and press Zero current joint position to calibrate the joint.
UR3 44 Service Manual
5.Service and Replacement of Parts
Copyright © 2009–2021 by UniversalRobotsA/S. All rights reserved.
 Loading...
Loading...









