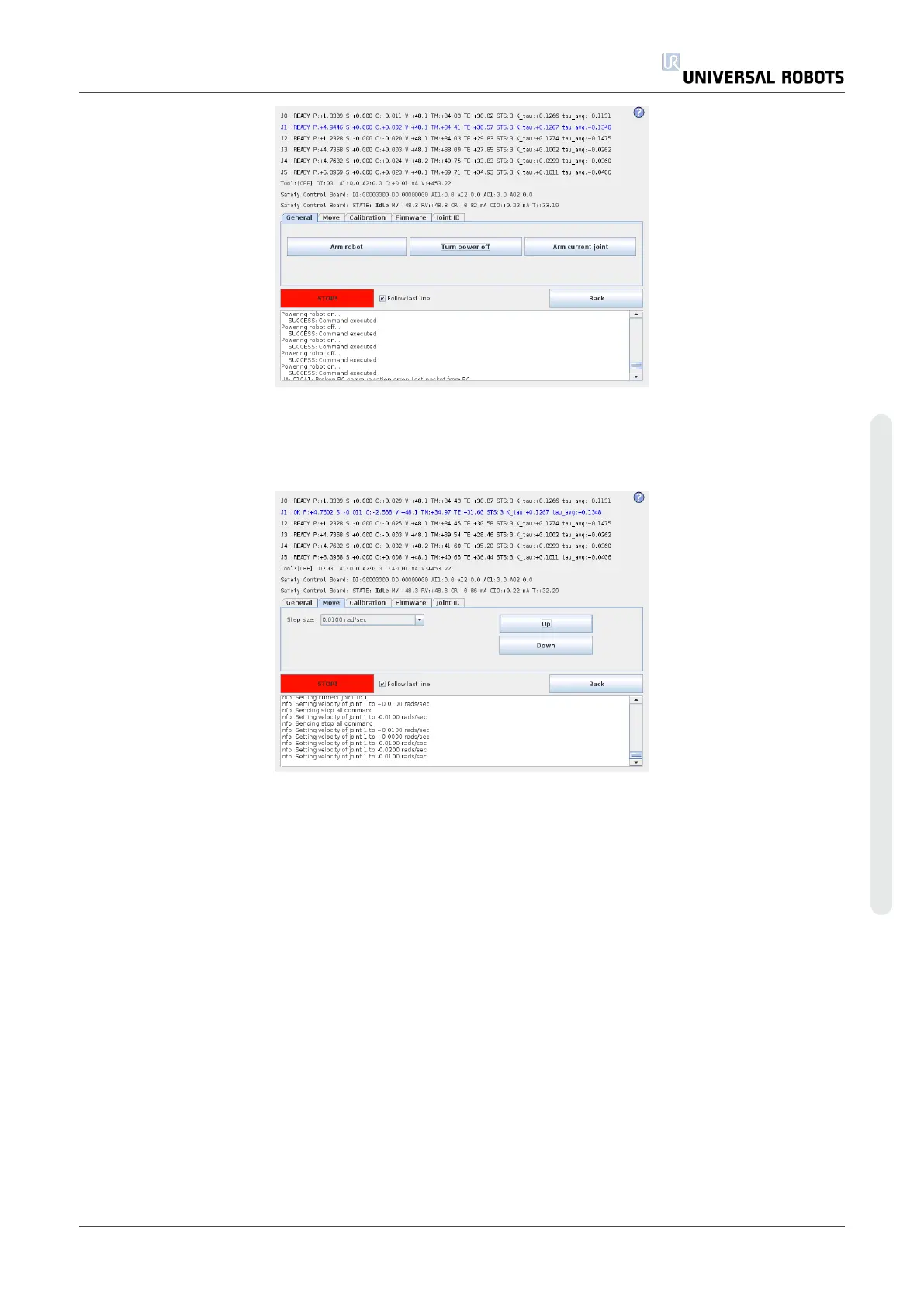
Use the Up and Down buttons in the Move window to rotate the joint to the correct zero position
according to the following illustrations.
Press STOP when the joint is in the correct position.
9. Zero position illustrations
Base: Shoulder, Elbow, Wrist 1:
Service Manual 39 UR5
5.Service and Replacement of parts
Copyright © 2009–2021 by UniversalRobotsA/S. All rights reserved.