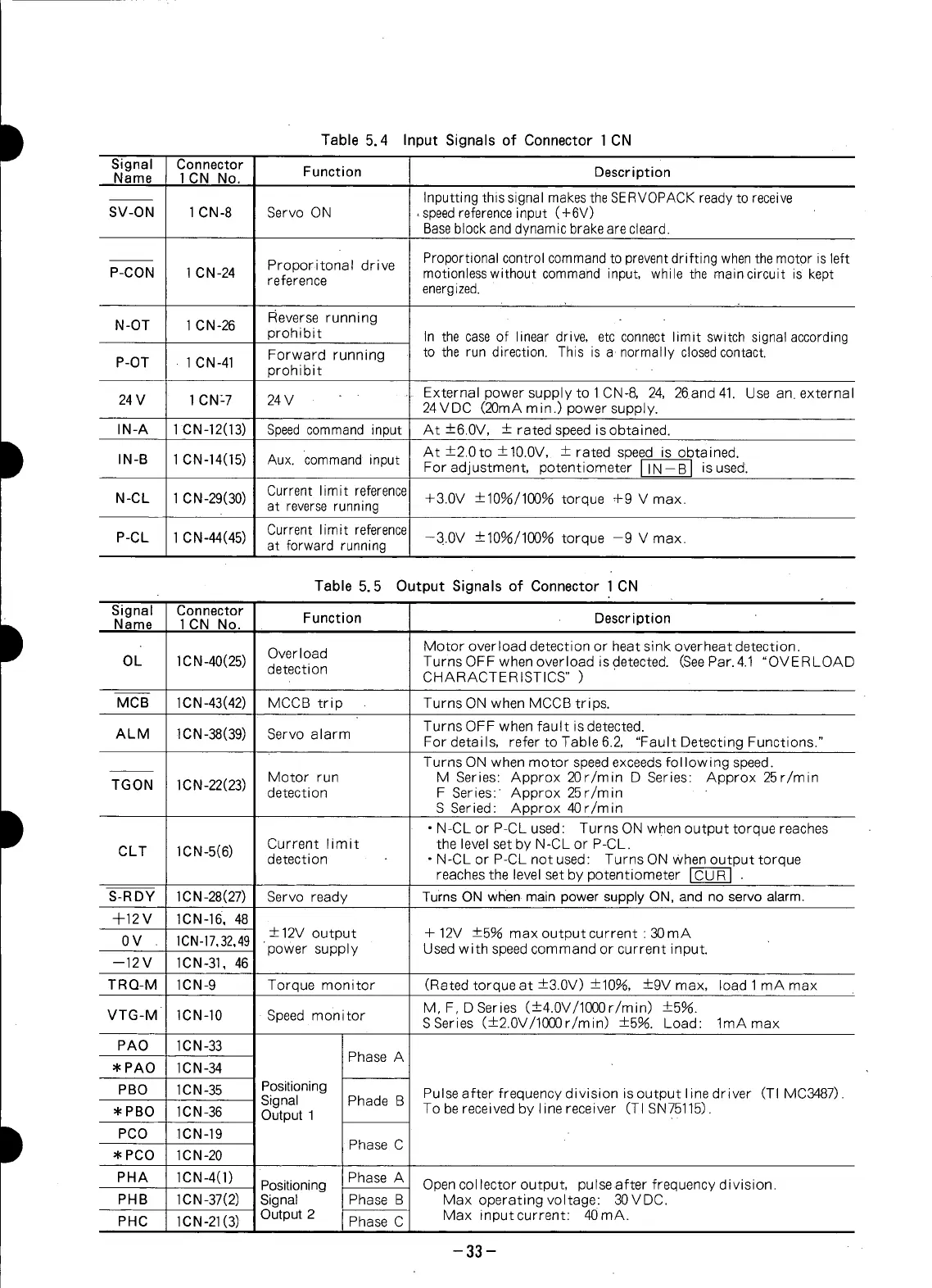
D Table 5.4 Input Signals of Connector 1 CN
Signal Connector Function Description
Name ] CN No.
Inputting this signal makes the SERVOPACK ready to receive
SV-ON 1 CN-8 Servo ON , speedreference input (+6V)
Base block and dynamic brake are cleard.
Proporitonal drive Proportional control command to prevent drifting when the motor is left
P-CON ] CN-24 reference motionless without command input, while the mamc_rcmt _skept
energ i zed.
Reverse running
N-OT 1CN-26
prohibit In the case of linear drive, etc connect limit switch signal according
Forward running to the run direction. This is a. normally closed contact.
P-OT ] CN-41
prohibit
External power supply to 1 CN-8, 24, 26and 41. Use an. external
24V 1CN:7 24V
24VDC (20mA min.) power supply.
IN-A 1 CN-12(13) Speed command input At +6.0V, 4- rated speed is obtained.
D At +2.0to +10.0V, 4- rated speed is obtained.
IN-B ] CN-14(15) Aux. command input For adjustment, potentiometer _ is used.
N-CL 1CN-29(30) Current limit reference +3.0V +10%/100% torque +9 V max.
at reverse running
P-CL ] CN-44(45) Current limit reference
at forward running -3.0V +10%/100% torque -9 V max.
Table 5.5 Output Signals of Connector I CN
Signal Connector
D Name I CN No. Function Description
Overload Motor overload detection or heat sink overheat detection.
OL 1CN-40(25) detection Turns OFF when overload is detected. (SeePar. 4.1 "OVERLOAE:
CHARACTERISTICS")
MCB 1CN-43(42) MCCB trip Turns ON when MCCB trips.
Turns OFF when fault is detected.
ALM lCN-38(39) Servo alarm
For details, refer to Table 6.2, "Fault Detecting Functions."
Turns ON when motor speed exceeds fol lowing speed.
Motor run M Series: Approx 20r/min D Series: Approx 25r/rain
TGON lCN-22(23) detection F Series: Approx 25r/min '
S Seried: Approx 4Or/min
D •N-CL P-CLused: TurnsON reaches
or
when
output
torque
Current limit the level set by N-CL or P-CL.
CLT ]CN-5(6) detection -N-CLorP-CLnotused: Turns ON When output torque
reaches the level set by potentiometer _ .
S-RDY 1CN-28(27) Servo ready Turns ON when main power supply ON, and no servo alarm.
Jr-12 V 1CN-16, 48
+12V output +12V +5% max output current ' 30mA
0 V 1CN-17,32,49 power supply Used with speed command or current input.
--12V 1CN-31, 46
TRQ-M 1CN-9 Torque monitor (Rated torque at-+3.0V) -+10%, +gVmax, IoadlmAmax
M, F, DSeries (-+4.0V/1000r/min) -+5%.
VTG-M 1CN-10 Speed monitor SSeries (-+2.0V/1000r/min) -+5%. Load: lmAmax
PAO 1CN-33
Phase A
PAO 1CN-34
PBO 1CN-35 Positioning Pulse after frequency division is output line driver (TI MC3487).
Signal Phade B
,I,PBO 1CN-36 Output 1 To be received by line receiver (TI SN75115).
D PCO lCN-19
_1,PCO lCN-20 Phase C
PHA 1CN-4(1) Positioning Phase A Open collector output, pulseafter frequency division.
PHB 1CN-37(2) Signal Phase B Max operating voltage: 30VDC.
PHC 1CN-21(3) Output2 Phase C Max mputcurrent: 40mA.
-33-