5.2 Motor Performance Fine Tuning
This section offers helpful information for counteracting oscillation, hunting, or other faults
that occur while performing a trial run.
Note: This
section describes parameters that are commonly
edited. Consult Yaskawa for more information on
detailed settings and fine-tuning the drive.
u
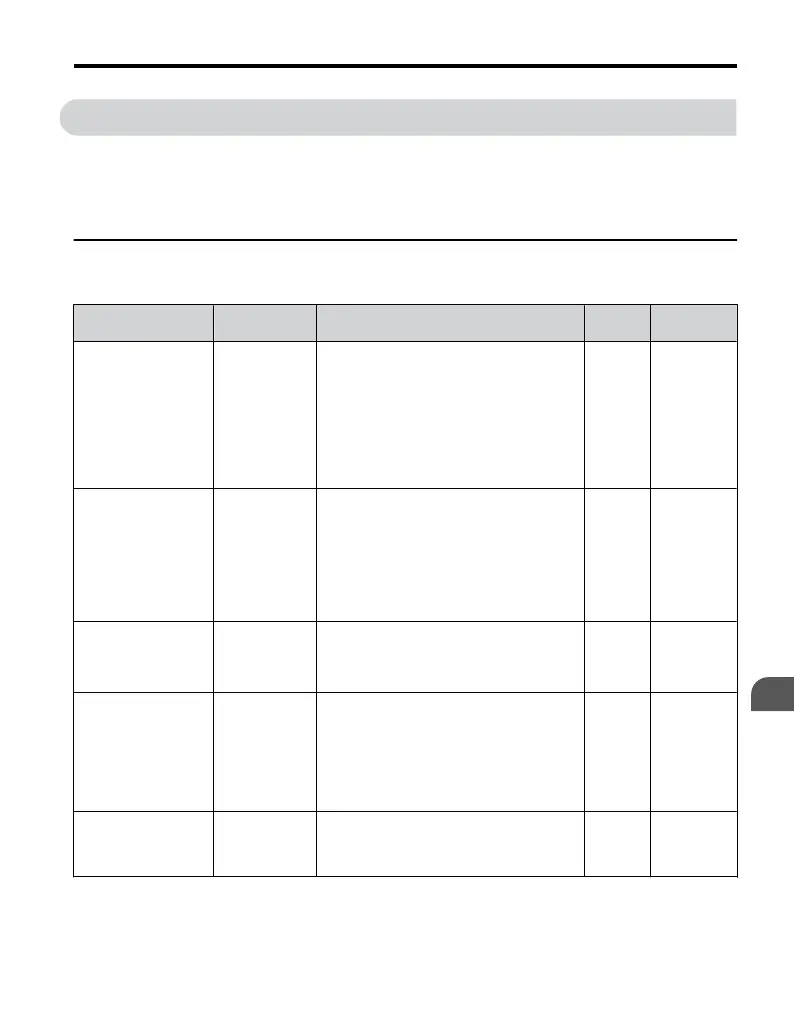
Parameters for Tuning the Drive
Table 5.1 Parameters for Tuning the Drive
Problem Parameter Corrective Action
Default
Value
Suggested
Setting
• Motor hunting and
oscillation at speeds
between 10 and 40
Hz
Hunting
Prevention Gain
(n1-02)
• If insufficient motor torque relative to the
size of the load causes hunting, reduce the
setting.
•
When motor hunting and oscillation occur
with a light load, increase the setting.
•
Lower this setting if hunting occurs when
using a motor with a relatively low
inductance,
such
as
a
high-frequency
motor
or a motor with a larger frame size.
1.00 0.00 to 2.00
• Motor noise
• Motor hunting and
oscillation at speeds
up to 40 Hz
Carrier
Frequency
Selection
(C6-02)
• If the motor noise is too loud, increase the
carrier frequency.
• When motor hunting and oscillation occur
at speeds up to 40 Hz, lower the carrier
frequency.
• The default setting for the carrier frequency
depends on the drive capacity (o2-04) and
the Drive Duty Selection (C6-01).
7 (Swing
PWM)
1 to 7
• Poor motor torque at
speeds below 10 Hz
• Motor hunting and
oscillation
Torque
Compensation
Gain (C4-01)
• If motor torque is insufficient at speeds
below 10 Hz, increase the setting.
• If motor hunting and oscillation with a
relatively light load, decrease the setting.
1.00 0.50 to 1.50
• Poor motor torque at
low speeds
• Motor instability at
motor start
Mid Output
Voltage A
(E1-08)
Minimum
Output Voltage
(E1-10)
• If torque is insufficient at speeds below 10
Hz, increase the setting.
• If motor instability occurs at motor start,
decrease the setting.
Note: The recommended setting value is for
200 V class drives. Double this value when
using a 400 V class drive.
E1-08:
16.0 V
E1-10:
12.0 V
Initial value
±5 V
• Poor speed
precision
Slip
Compensation
Gain (C3-01)
• After setting the motor-rated current
(E2-01), motor-rated slip (E2-02) and motor
no-load current (E2-03), adjust the slip
compensation gain (C3-01).
- 0.5 to 1.5
Note: Use
slip
compensation
to
improve
speed
precision.
First make sure that the proper values have been set
for the motor rated current to E2-01, motor rated slip (E2-02), and motor no-load current (E2-03). Next,
adjust the slip compensation gain set to C3-01 so that it is between 0.5 to 1.5.
5.2 Motor Performance Fine Tuning
YASKAWA ELECTRIC TOEP C710606 25D YASKAWA AC Drive J1000 Installation & Start-Up Manual
131
5
Troubleshooting

 Loading...
Loading...






