B3-12
IM 34M06H62-02E 2nd Edition : June 2008-00
B3.3 Setting Operation Parameters
Operation parameters define module operation. They are classified into PID parameters
and function settings.
This section describes the operation parameters that must be set before you can start
module operation as described in Section B3.4, "Operation." The function settings, which
are optional, include output-, PV-, SP-, and alarm-related function settings. For details,
see Sections C2, "Output-related Functions," C3, "PV-related Functions," C4,
"SP-related Functions," and C8, "Alarm Function."
The operation parameters that must be set before module operation depend on whether
you intend to use dynamic auto-tuning. Go to Section B3.3.1, "Preparing for Dynamic
Auto-tuning," if you intend to use dynamic auto-tuning. You may skip to Section B3.3.2,
"Preparing for PID Control," otherwise.
Changing a controller parameter or I/O parameter initializes all operation parameters.
Therefore, always set the controller parameters and I/O parameters before setting the
operation parameters.
B3.3.1 Preparing for Dynamic Auto-tuning
In dynamic auto-tuning mode, the PID control parameters (proportional band, integral
time, and derivative time) are automatically determined and set. To enter dynamic
auto-tuning mode, set the Dynamic Auto-tuning Enable (SELF) parameter to 1 (enabled)
as shown in Table B3.10. When SELF is set to 1, it is automatically enabled (no
additional procedure is required to enable the setting). Now you are ready to start module
operation.
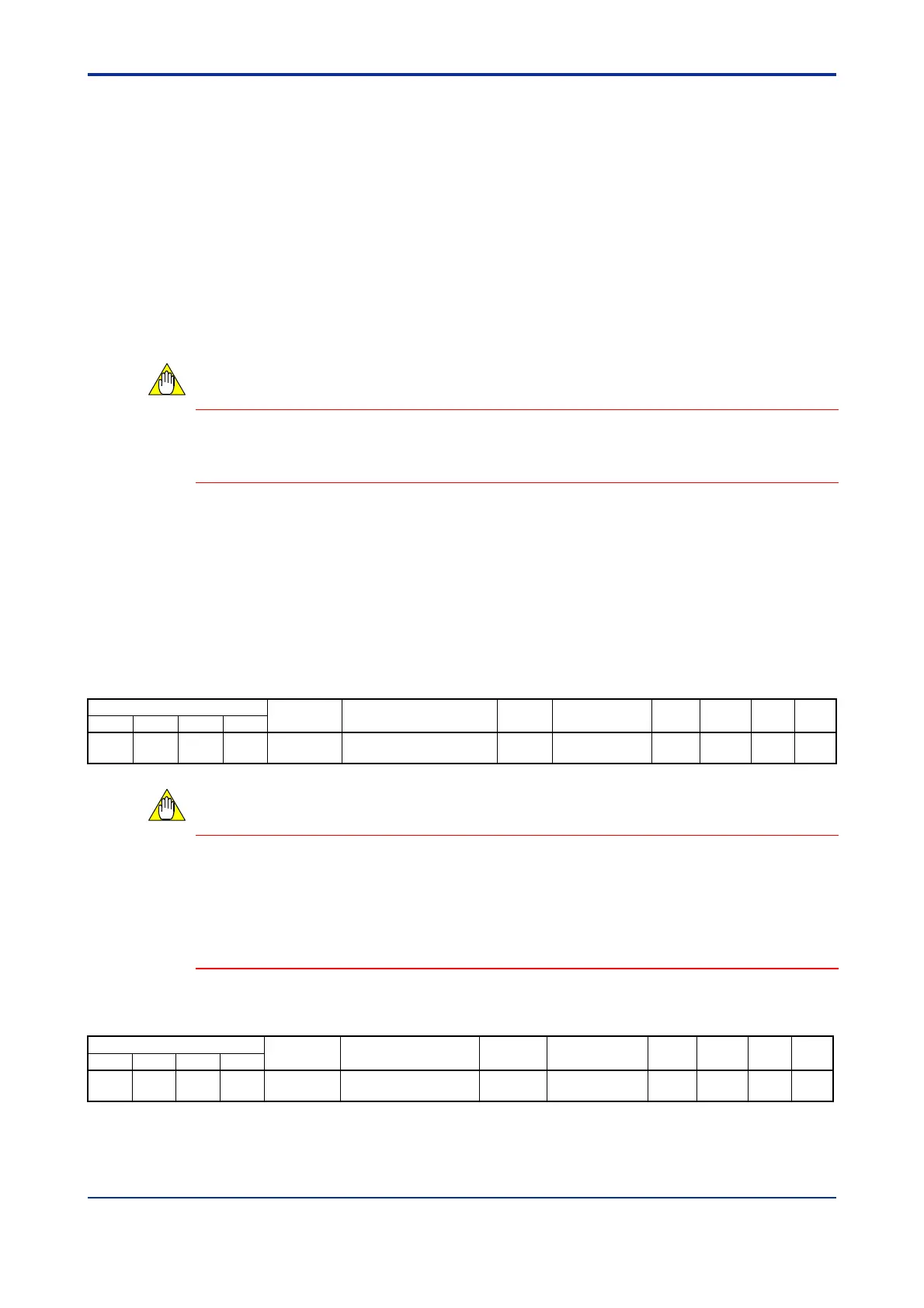
Table B3.10 Dynamic Auto-tuning Selection
Data Position Number
Symbol Description Unit Data Range
Default
Value
Attribute Stored
See
Also
Loop 1 Loop 2 Loop 3 Loop 4
181 381 581 781 SELF
Dynamic auto-tuning
enable
None
0: Disabled
1: Enabled
0 RW C5.1
There are some pre-conditions for using dynamic auto-tuning: the controller mode must
be set to either Single Loop or Two-input Changeover Control, and the control type must
be set to PID Control. For details on dynamic auto-tuning, see Section C5.1, "Dynamic
Auto-tuning."
When not using dynamic auto-tuning, set the PID control parameters manually as
described in Section B3.3.2, "Preparing for PID Control."
Table B3.11 Operation Parameters That Must be Set when Using Dynamic Auto-tuning
*1
Data Position Number
Symbol Description Unit Data Range
Default
Value
Attribute Stored
See
Also
Loop 1 Loop 2 Loop 3 Loop 4
201 401 601 801 1.SP Set point
Industrial
unit
PRL to PRH PRL RW C4.
*1: To switch between PID parameter groups, see Section C4, "SP-related Functions."
CAUTION
CAUTION
 Loading...
Loading...