D2-4
IM 34M06H62-02E 2nd Edition : June 2008-00
(3) The loop is out of control (with an oscillating response)
If the loop is out of control (with an oscillating response), it may be due to an improper
value in an operation control, input, control or output parameter. Follow the steps below
to locate the cause.
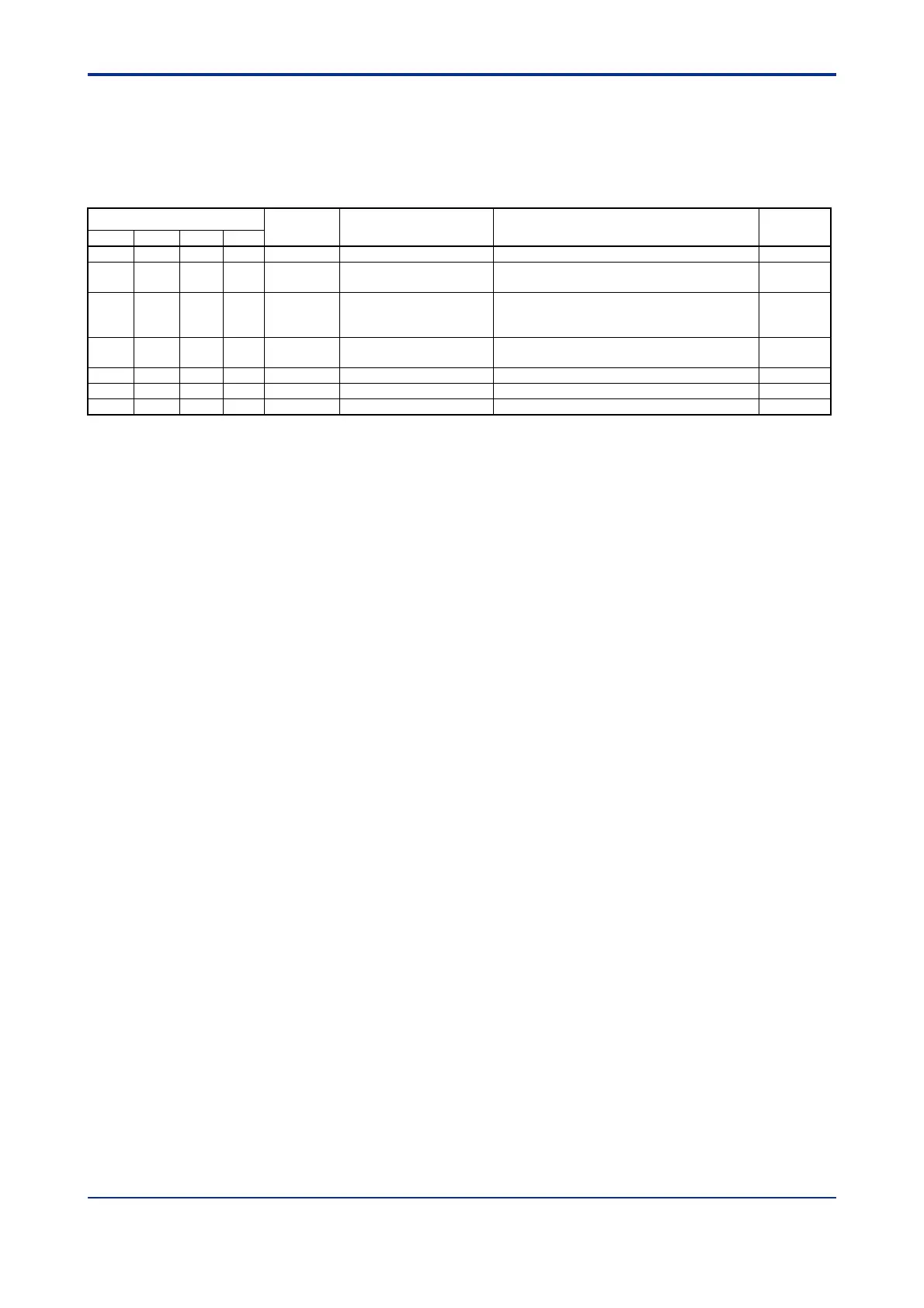
Data Position Number
Symbol Description Check Items See Also
Loop 1 Loop 2 Loop 3 Loop 4
121 321 521 721 RUN/STP Run/stop selection Is RUN/STP set to “1: Run”? C.7.1
122 322 522 722 A/M/C
Automatic/manual/
cascade selection
Is A/M/C set to either Automatic or Cascade? C.7.4
141 341 541 741 OT Control type selection
Is ON/OFF Control selected?
ON/OFF control tends to result in an
oscillating output.
C.2.1
181 381 581 781 SELF
Dynamic auto-tuning
enable
C.5.1
182 382 582 782 SC "Super" enable code C6.7
191 391 591 791 CT Cycle time C2.4
192 392 592 792 CTc Cooling cycle time C2.4
- If time proportional output is selected, check that the cycle time (CT) is compatible
with the system response. In this mode, the input sampling period is actually
determined by CT. If the actuator allows, you can reduce CT to improve the system
characteristics.
- Are the PID parameters automatically set with auto-tuning? If so, check that the PID
parameter values are proper. For details on how to start auto-tuning, see Section
C5.2, "Auto-tuning." For details on how to adjust the PID parameters manually, see
Section C6.5, "Manual Adjustment of PID Constants."
- Are the PID parameters automatically set with dynamic auto-tuning? If so, check that
the PID parameter values are proper. If not, disable dynamic auto-tuning, and either
use (normal) auto-tuning or manually set the PID parameters. For details on how to
start auto-tuning, see Section C5.2, "Auto-tuning." For details on how to manually
tune the PID parameters, see Section C6.5, "Manual Adjustment of PID Constants."
- Is the control output fluctuating excessively? If so, you can adjust the PID
parameters, input filter or relative positions between sensors and actuators to
suppress fluctuations.
- If multiple loops are used, are they interfering with each other? If sensors or
actuators of different loops are located too near to each other, the output from one
loop may significantly affect the PV value of another loop.
- If the above measures still fail to solve the problem, replace the loop and repeat the
same troubleshooting steps. If you have a spare module, replace the module and
repeat the same troubleshooting steps. If the problem persists, check for and correct
any faulty sensors or wiring. If the problem disappears, check the operation as
described in Section D1, "Before Performing Checks."
 Loading...
Loading...