C6-12
IM 34M06H62-02E 2nd Edition : June 2008-00
C6.8 Anti-reset Windup
The anti-reset windup function suppresses overshoot, which tends to develop right after
PID control operation begins. The function is triggered when the control output reaches
its upper (OH) or lower (OL) limit. It runs in two modes, namely Automatic and Manual,
which can be selected using the ARW parameter. The two modes differ in when normal
PID control is resumed. This timing is automatically determined in automatic mode, but
predefined in manual mode.
The default value of ARW is 0 (automatic mode). In the automatic mode, PID
computation continues even if the control output reaches its upper or lower limit while the
integral term is adjusted so that the new computation result brings the control output back
within the control output range. Once the control output returns within the output range,
normal PID computation resumes.
If ARW is set to a non-zero value, the anti-reset windup function runs in manual mode,
where PID computation is suspended when the control output reaches its upper or lower
limit, and resumed when the deviation falls within the range specified with ARW. Here the
value of ARW is a percentage of the proportional band (PB). Thus, if ARW is set to 100%,
PID computation resumes when the deviation falls within a range equal to PB.
Example: If ARW = 100% and PB = 20%, the integral computation resumes when the
deviation is 20% or less, as the inequality expression 'deviation x 100/20 < 100' must be
satisfied.
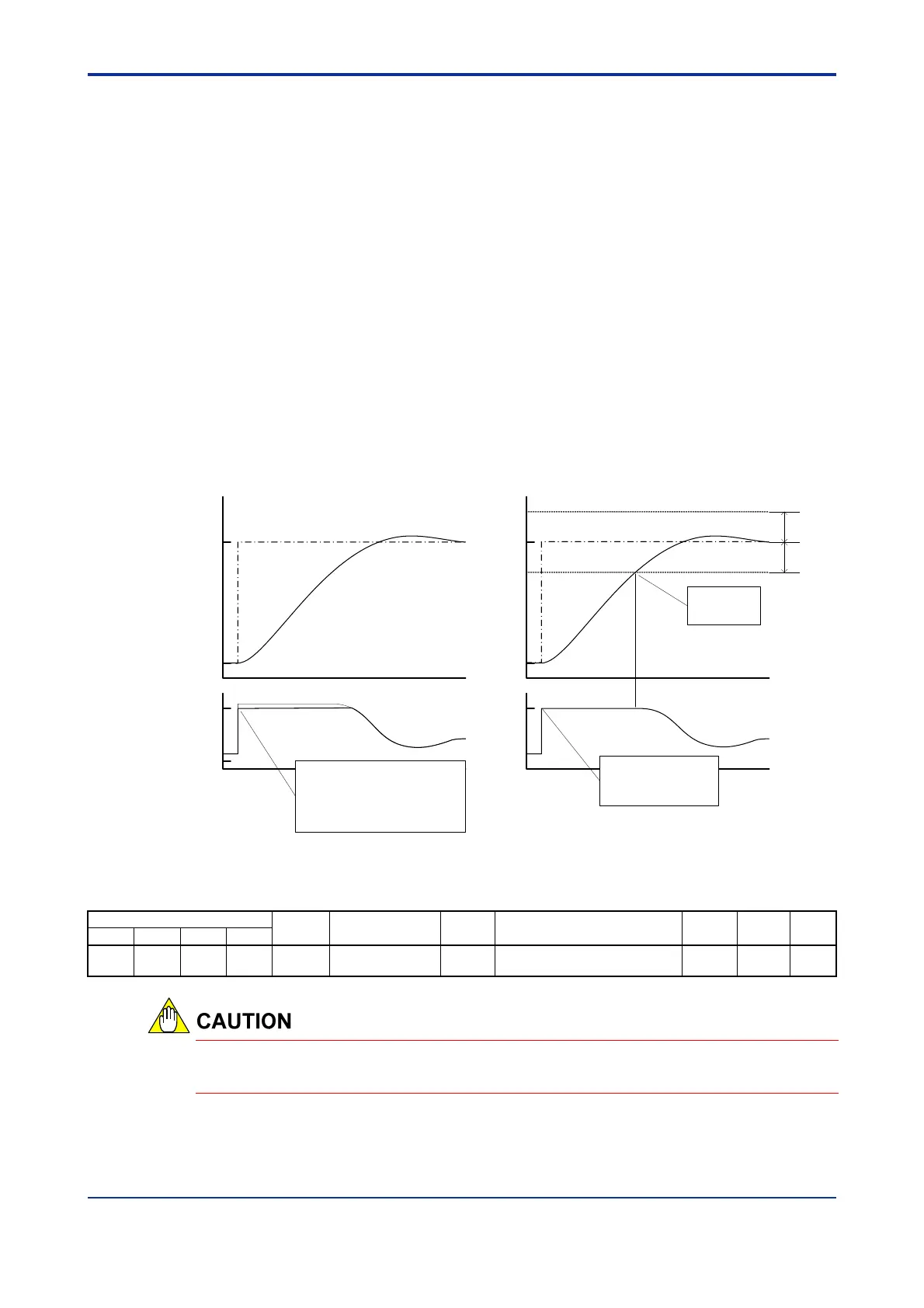
SP
PV
SP1
SP2
OH
When control output reaches OH, PID
computation continues but its integration
term is adjusted so that the computation
result gradually falls below OH, at which
time normal PID computation resumes
automatically.
Automatic mode (with ARW set to 0)
SP
PV
ARWARW
OUT
SP1
SP2
OH
PID computation
resumes when
deviation = ARW
When control output reaches
OH, PID computation is
suspended and the control
output is fixed at OH.
Manual mode (with ARW set to a non-zero value)
OL
OUT
Figure C6.12 Anti-reset Windup Function
Table C6.7 Parameters Related to Anti-reset Windup
Data Position Number
Symbol Description Unit Data Range
Default
Value
Attribute
Stored
Loop1 Loop2 Loop3 Loop4
183 383 583 783 ARW ARW Setting %
0: Automatic
500 to 2000 (50.0 to 200.0%)
0 RW
The ARW parameter is not meant for enabling and disabling the Anti-Reset Windup
function.
 Loading...
Loading...