1 Description
1.5.3 Maximum load and moment of inertia for full axis 5 movement
3HAC9117-1 Rev.N 33
1.5.3 Maximum load and moment of inertia for full axis 5 movement
General
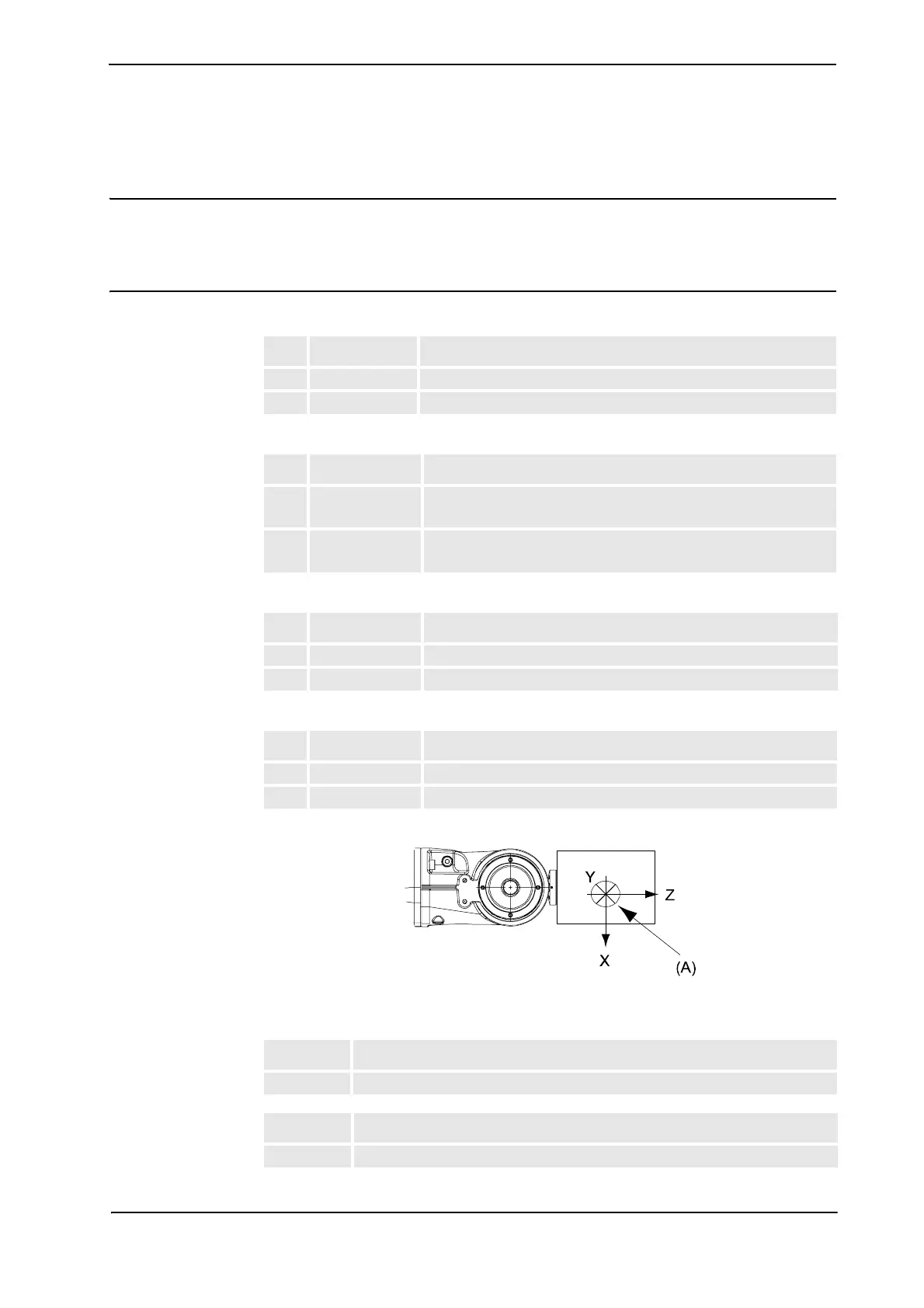
Total load given as: Mass in kg, center of gravity (Z and L) in meter and moment of
inertia (J
ox
, J
oy
, J
oz
) in kgm
2
. L= √(X
2
+ Y
2
), see Figure 18.
Full movement of Axis 5 (±120º)
5
Figure 18 Moment of inertia when full movement of axis 5.
Axis Robot Type Max. value
5 IRB 4400/L10 J
5
= Mass x ((Z + 0.085)
2
+ L
2
) + max (J
0x
, J
0y
) ≤ 1.15 kgm
2
6 IRB 4400/L10 J
6
= Mass x L
2
+ J
0Z
≤ 0.70 kgm
2
Axis Robot Type Max. value
5 IRB 4400/L30,
IRB 4450S
J
5
= Mass x ((Z + 0.14)
2
+ L
2
) + max (J
0x
, J
0y
) ≤ 22.0 kgm
2
6 IRB 4400/L30,
IRB 4450S
J
6
= Mass x L
2
+ J
0Z
≤ 12.0 kgm
2
Axis Robot Type Max. value
5 IRB 4400/45 J
5
= Mass x ((Z + 0.14)
2
+ L
2
) + max (J
0x
, J
0y
) ≤ 25.0 kgm
2
6 IRB 4400/45 J
6
= Mass x L
2
+ J
0Z
≤ 16.5 kgm
2
Axis Robot Type Max. value
5 IRB 4400/60 J
5
= Mass x ((Z + 0.14)
2
+ L
2
) + max (J
0x
, J
0y
) ≤ 30.0 kgm
2
6 IRB 4400/60 J
6
= Mass x L
2
+ J
0Z
≤ 17.5 kgm
2
Pos Description
A Center of gravity
Description
J
ox
, J
oy
, J
oz
Max. moment of inertia around the X, Y and Z axes at center of gravity.