1 Description
1.8.2 Performance according to ISO 9283
48 Rev.N 3HAC9117-1
1.8.2 Performance according to ISO 9283
General
At rated load and 1,6 m/s velocity on the inclined ISO test plane with all six robot
axes in motion.
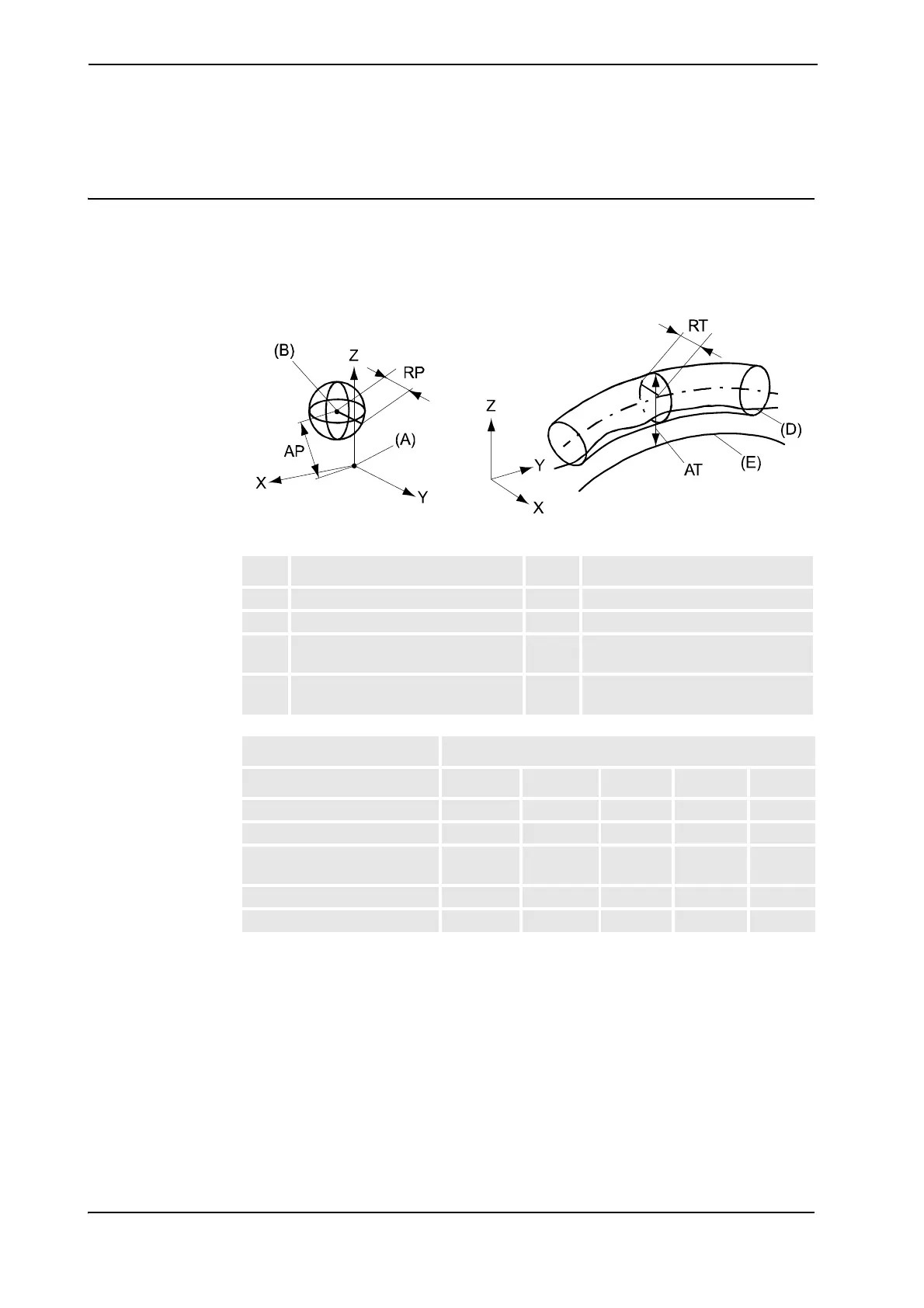
The figures for AP, RP, AT and RT are mesured according to Figure 27.
Figure 27 Explanation of ISO values.
The above values are the range of average test-results from a number of robots.
Pos Description Pos Description
A Programmed position E Programmed path
B Mean position at program execution D Actual path at program execution
AP Mean distance from programmed
position
AT Max deviation from E
RP Tolerance of posiotion B at repeated
positioning
RT Tolerance of the path at repeated
program execution
Description Values
IRB 4400L/10 4400/30 4400/45 4400/60 4450S
Pose accuracy, AP
a
(mm)
a. AP according to the ISO test above, is the difference between the teached position
(position manually modified in the cell) and the average position obtained during
program execution.
0.04 0.07 0.04 0.12 0.03
Pose repeatability, RP (mm) 0.05 0.07 0.04 0.19 0.03
Pose stabilization time, PSt (s)
within 0.2 mm of the position
0.25 0.20 0.18 0.27 0.31
Path accuracy, AT (mm) 0.57 1.02 0.47 0.56 1.19
Path repeatability, RT(mm) 0.16 0.28 0.13 0.56 0.11