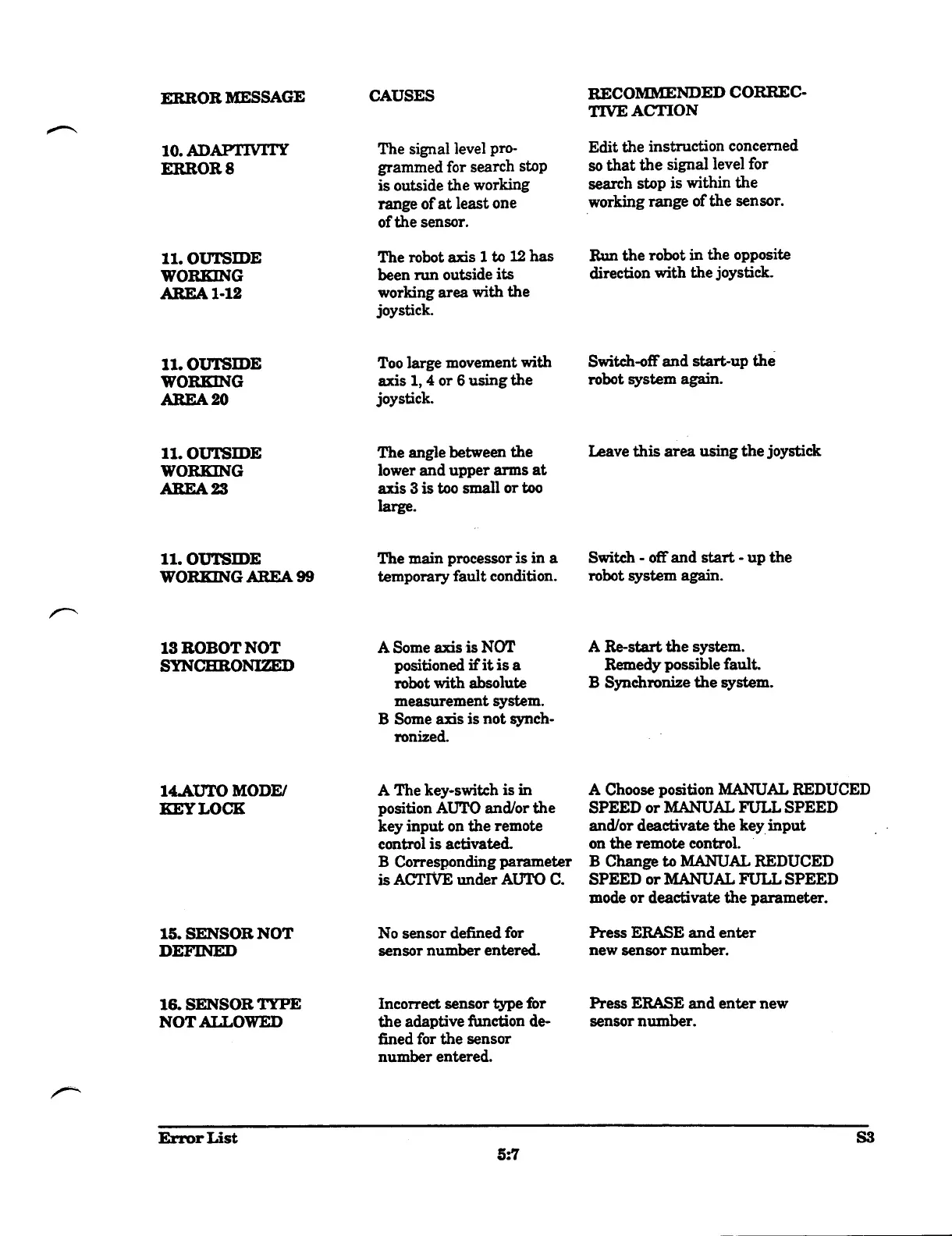
ERROR MESSAGE
10
. ADAPTIVITY
ERROR
8
11
. OUTSIDE
WORKING
AREA 1-12
11
. OUTSIDE
WORKING
AREA 20
11
. OUTSIDE
WORKING
AREA 23
11
. OUTSIDE
WORKING AREA 99
13 ROBOT NOT
SYNCHRONIZED
14AUTO MODE/
KEY LOCK
15
. SENSOR NOT
DEFINED
16
. SENSOR TYPE
NOT ALLOWED
Error List
CAUSES
The signal level pro-
grammed for search stop
is outside the working
range of at least one
of the sensor
.
The robot axis 1 to 12 has
been run outside its
working area with the
joystick
.
Too large movement with
axis
1, 4 or 6 using the
joystick
.
The angle between the
lower and upper arms at
axis 3 is too small or too
large
.
The main processor is in a
temporary fault condition
.
A Some
axis is
NOT
positioned if it is a
robot with absolute
measurement system
.
•
~
Some axis is not synch-
ronized
.
A The key-switch is in
position AUTO and/or the
key input on the remote
control is activated
.
•
~
Corresponding parameter
is ACTIVE under AUTO C
.
No sensor defined for
sensor number entered
.
Incorrect sensor type for
the adaptive function de-
fined for the sensor
number entered
.
5
:7
RECOMMENDED CORREC-
TIVE ACTION
Edit the instruction concerned
so that the signal level for
search stop is within the
working range of the sensor
.
Run the robot in the opposite
direction with the joystick
.
Switch-off and start-up the
robot system again
.
Leave this area using the joystick
Switch
-
off and start
-
up the
robot system again
.
A Re-start the system
.
Remedy possible fault
.
B Synchronize the system
.
A Choose position MANUAL REDUCED
SPEED or MANUAL FULL SPEED
and/or deactivate the key input
on the remote control
.
B Change to MANUAL REDUCED
SPEED or MANUAL FULL SPEED
mode or deactivate the parameter
.
Press ERASE and enter
new sensor number
.
Press ERASE and enter new
sensor number
.