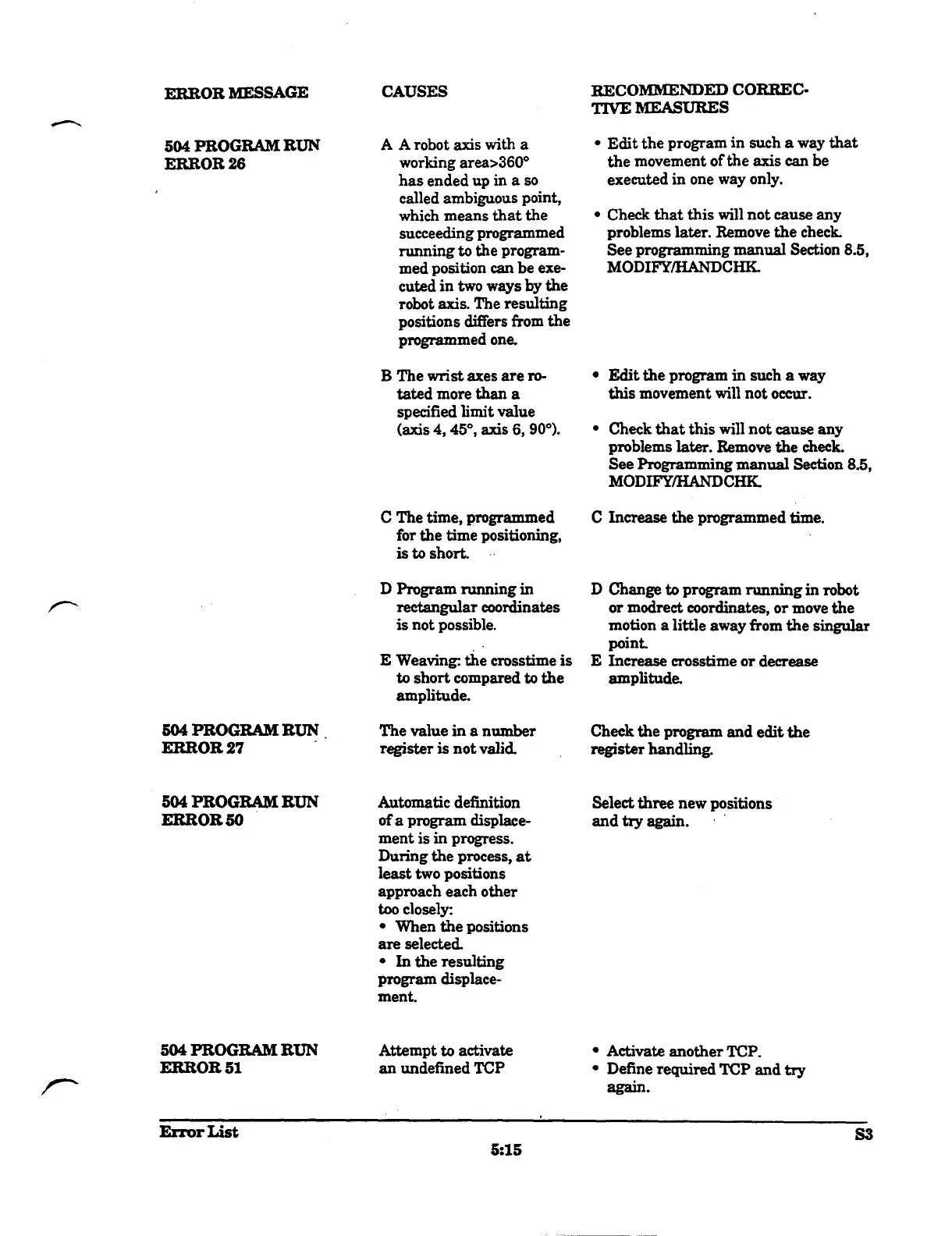
ERROR MESSAGE
CAUSES
504 PROGRAM RUN
~
A
A robot axis with a
ERROR 26
~
working area>360°
has ended up in a so
called ambiguous point,
which means that the
succeeding programmed
running to the program-
med position can be exe-
cuted in two ways by the
robot axis
. The resulting
positions differs from the
programmed one
.
B The wrist axes are ro-
tated more than a
specified limit value
(axis 4, 45
°
, axis 6, 90°)
.
C The time, programmed
for the time positioning,
is to short
.
D Program running in
rectangular coordinates
is not possible
.
E Weaving
: the crosstime is
to short compared to the
amplitude
.
504 PROGRAM RUN
~
The value in a number
ERROR 27
~
register is not valid
.
504 PROGRAM RUN
~
Automatic definition
ERROR 50
~
of a program displace-
ment is in progress
.
During the process, at
least two positions
approach each other
too closely
:
•
~
When the positions
are selected
.
•
In the resulting
program displace-
ment
.
504 PROGRAM RUN
~
Attempt to activate
ERROR 51
~
an undefined TCP
Error List
5
:
1
5
RECOMMENDED CORREC-
TIVE MEASURES
•
~
Edit the program in such a way that
the movement of the axis can be
executed in one way only
.
•
~
Check that this will not cause any
problems later
. Remove the check
.
See programming manual Section 8
.5,
MODIFY/HANDCHK
.
•
~
Edit the program in such a way
this movement will not occur
.
•
~
Check that this will not cause any
problems later
. Remove the check
.
See Programming manual Section 8
.5,
MODIFY/HANDCHK
C Increase the programmed time
.
D Change to program running in robot
or modrect coordinates, or move the
motion a little away from the singular
point
.
•
~
Increase crosstime or decrease
amplitude
.
Check the program and edit the
register handling
.
Select three new positions
and try again
.
~
.
•
~
Activate another TCP
.
•
~
Define required TCP and try
again
.
S3