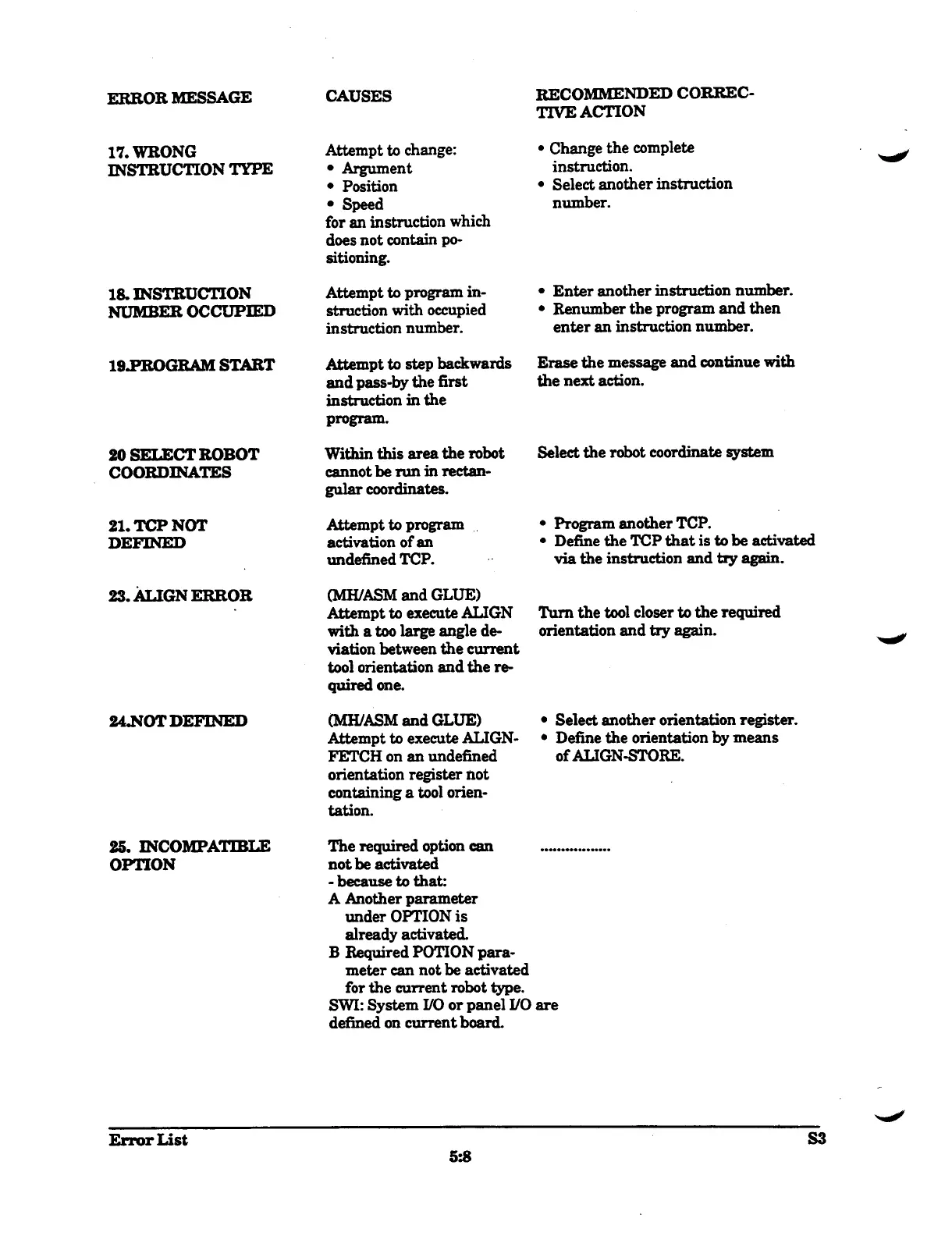
ERROR
MESSAGE
17
. WRONG
INSTRUCTION TYPE
18
. INSTRUCTION
NUMBER OCCUPIED
19
.ROGRAM START
20 SELECT ROBOT
COORDINATES
21
. TCP NOT
DEFINED
23
. ALIGN ERROR
24
.NOT DEFINED
25
. INCOMPATIBLE
OPTION
Error List
CAUSES
~
RECOMMENDED CORREC-
TIVE ACTION
Attempt to change
:
~
•
Change the complete
•
~
Argument
instruction
.
•
~
Position
•
Select another instruction
•
~
Speed
number
.
for an instruction which
does not contain po-
sitioning
.
Attempt to program in-
~
•
Enter another instruction number
.
struction with occupied
~
•
Renumber the program and then
instruction number
.
~
enter an instruction number
.
Attempt to step backwards
Erase the message and continue with
and pass-by the first
~
the next action
.
instruction in the
program
.
Within this area the robot
~
Select the robot coordinate system
cannot be run in rectan-
gular coordinates
.
Attempt to program
~
•
Program another TCP
.
activation of an
~
•
Define the TCP that is to be activated
undefined TCP
.
~
via the instruction and try again
.
(MHJASM and GLUE)
Attempt to execute ALIGN
Turn the tool closer to the required
with a too large angle de-
~
orientation and try again
.
viation between the current
tool orientation and the re-
quired one
.
(MH/ASM and GLUE)
~
•
Select another orientation register
.
Attempt to execute ALIGN-
•
Define the orientation by means
FETCH on an undefined
~
of ALIGN-STORE
.
orientation register not
containing a tool orien-
tation
.
The required option can
~
not be activated
-
because to that
:
A Another parameter
under OPTION is
already activated
.
B Required POTION para-
meter can not be activated
for the current robot type
.
SWI
: System I/O or panel I/O are
defined on current board
.
5
:8
S3