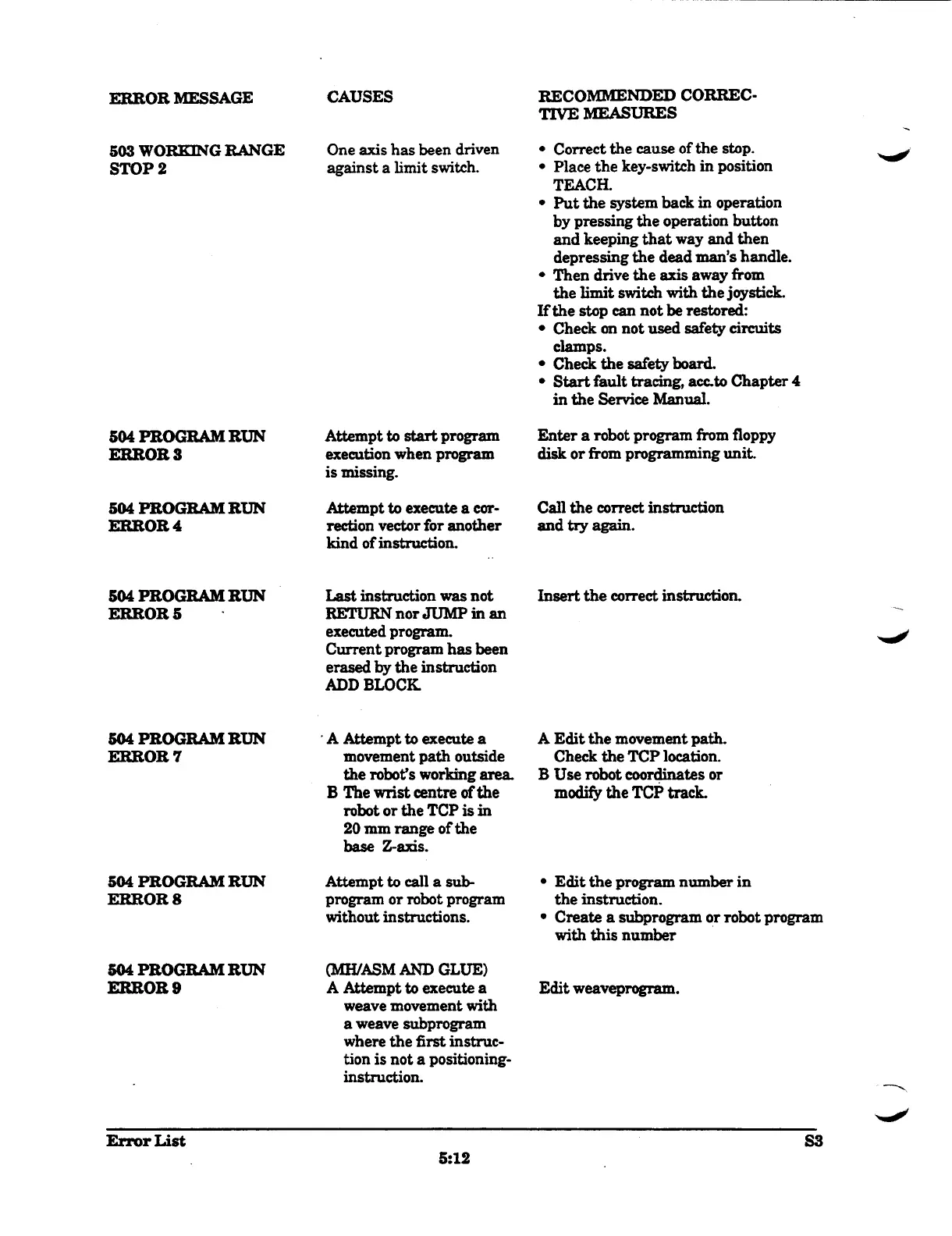
504 PROGRAM RUN
ERROR 3
504 PROGRAM RUN
ERROR 4
504 PROGRAM RUN
ERROR 5
504 PROGRAM RUN
ERROR 7
Error List
Attempt to start program
execution when program
is missing
.
Attempt to execute a cor-
rection vector for another
kind of instruction
.
Last instruction was not
RETURN nor JUMP
in an
executed program
.
Current program has been
erased by the instruction
ADD BLOCK
A Attempt to execute a
movement path outside
the robot's working area
.
B The wrist centre of the
robot or the TCP is in
5
:12
Enter a robot program from floppy
disk or from programming unit
.
Call the correct instruction
and try again
.
Insert the correct instruction
.
A Edit the movement path
.
Check the TCP location
.
B Use robot coordinates
or
modify the TCP track
.
S3
20 mm range of the
base Z-axis
.
504 PROGRAM RUN
Attempt to call a sub-
•
~
Edit the program number in
ERROR 8
program or robot program
the instruction
.
without instructions
.
•
~
Create a
subprogram
or
robot program
with this number
504 PROGRAM RUN
(MH/ASM AND GLUE)
ERROR 9
A Attempt to execute a
Edit weaveprogram
.
weave movement with
a weave subprogram
where the first instruc-
tion is not a positioning-
instruction
.
ERROR MESSAGE
503 WORE3NG RANGE
STOP 2
CAUSES
One axis has been driven
against a limit switch
.
RECOMMENDED CORREC-
TIVE MEASURES
•
~
Correct the cause of the stop
.
•
~
Place the key-switch in position
TEACH
.
•
~
Put the system back in operation
by pressing the operation button
and keeping that way and then
depressing the dead man's handle
.
•
~
Then drive the
axis
away
from
the limit switch with the joystick
.
If the stop can not be restored
:
•
~
Check
on
not used safety circuits
clamps
.
•
~
Check the safety board
.
•
~
Start fault tracing,
a
cc
.t
o
Chapter 4
in the Service Manual
.