Error List
5
:
1
6
S3
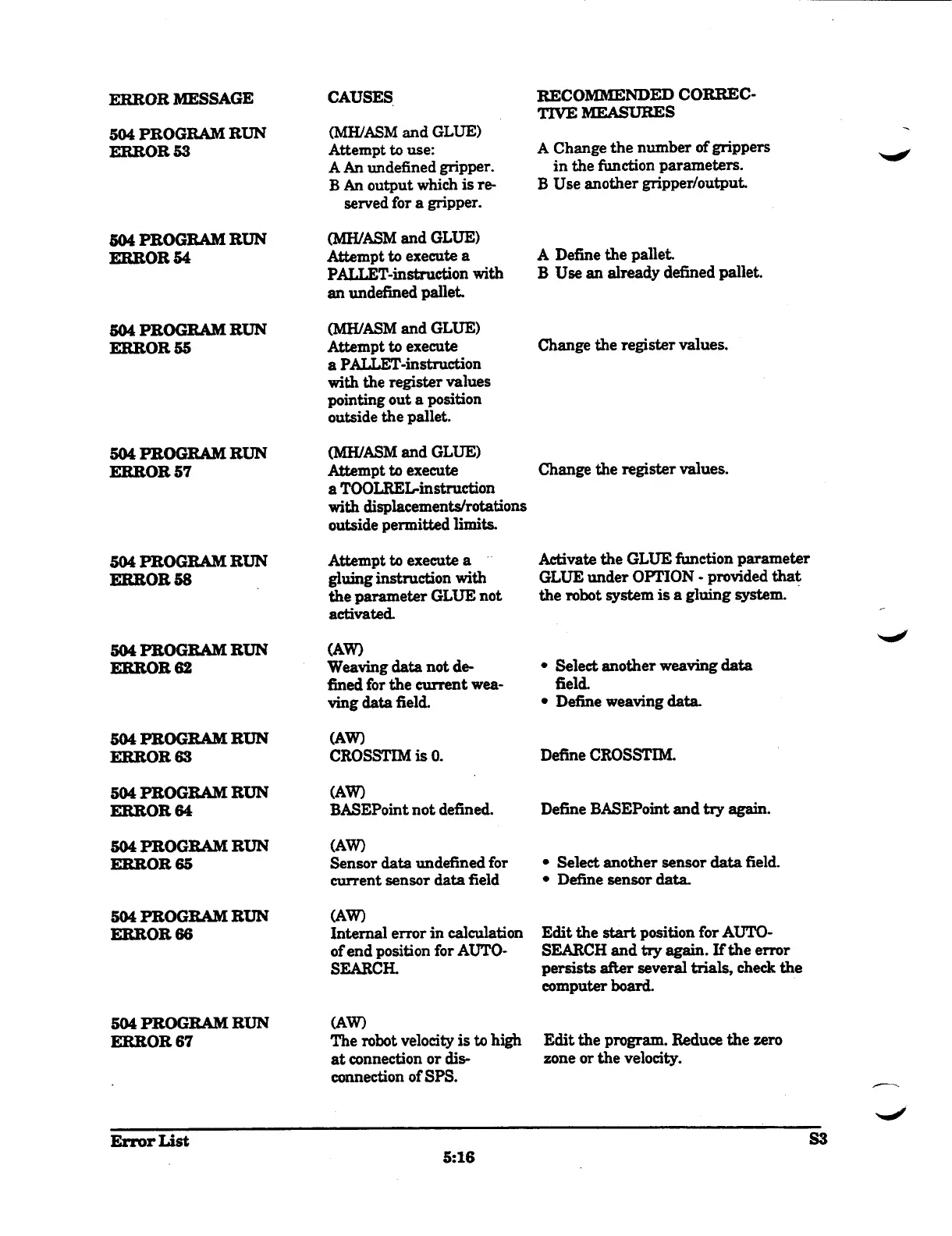
ERROR MESSAGE
CAUSES
RECOMMENDED
CORREC-
TIVE MEASURES
504
PROGRAM
RUN
(MH/ASM and GLUE)
ERROR
53
Attempt to use
:
A Change the number of grippers
A An undefined gripper
.
in the function parameters
.
B An output which is re-
B Use another gripper/output
.
served for a gripper
.
504
PROGRAM
RUN
(MH/ASM and GLUE)
ERROR 54
Attempt to execute a
A Define the pallet
.
PALLET-instruction with
B Use an already defined pallet
.
an undefined pallet
.
504
PROGRAM
RUN
(MH/ASM and GLUE)
ERROR 55
Attempt to execute
Change the register values
.
a PALLET-instruction
with the register values
pointing out a position
outside the pallet
.
504
PROGRAM
RUN
(MH/ASM and GLUE)
ERROR 57
Attempt to execute
Change the register values
.
a TOOLREL-instruction
with displacements/rotations
outside permitted limits
.
504
PROGRAM
RUN
Attempt to execute a
Activate the GLUE function parameter
ERROR 58
gluing instruction with
GLUE under OPTION
-
provided that
the parameter GLUE not
the robot system is a gluing system
.
activated
.
504
PROGRAM
RUN
(AW)
ERROR 62
Weaving data not de-
•
~
Select another weaving data
fined for the current wea-
field
.
ving data field
.
•
~
Define weaving data
.
504
PROGRAM
RUN
(AW)
ERROR 63
CROSSTIM is 0
.
Define CROSSTIM
.
504
PROGRAM
RUN
(AW)
ERROR 64
BASEPoint not defined
.
Define BASEPoint and try again
.
504
PROGRAM
RUN
(AW)
ERROR 65
Sensor data undefined for
•
~
Select another sensor data field
.
current sensor data field
•
~
Define sensor data
.
504
PROGRAM
RUN
(AW)
ERROR 66
Internal error in calculation
Edit the start position for AUTO-
of end position for AUTO-
SEARCH and try again
. If the error
SEARCH
.
persists after several trials, check the
computer board
.
504
PROGRAM
RUN
(AW)
ERROR 67
The robot velocity is to high
Edit the program
. Reduce the zero
at connection or dis-
zone or the velocity
.
connection of SPS
.