EVO 150 Controller
52
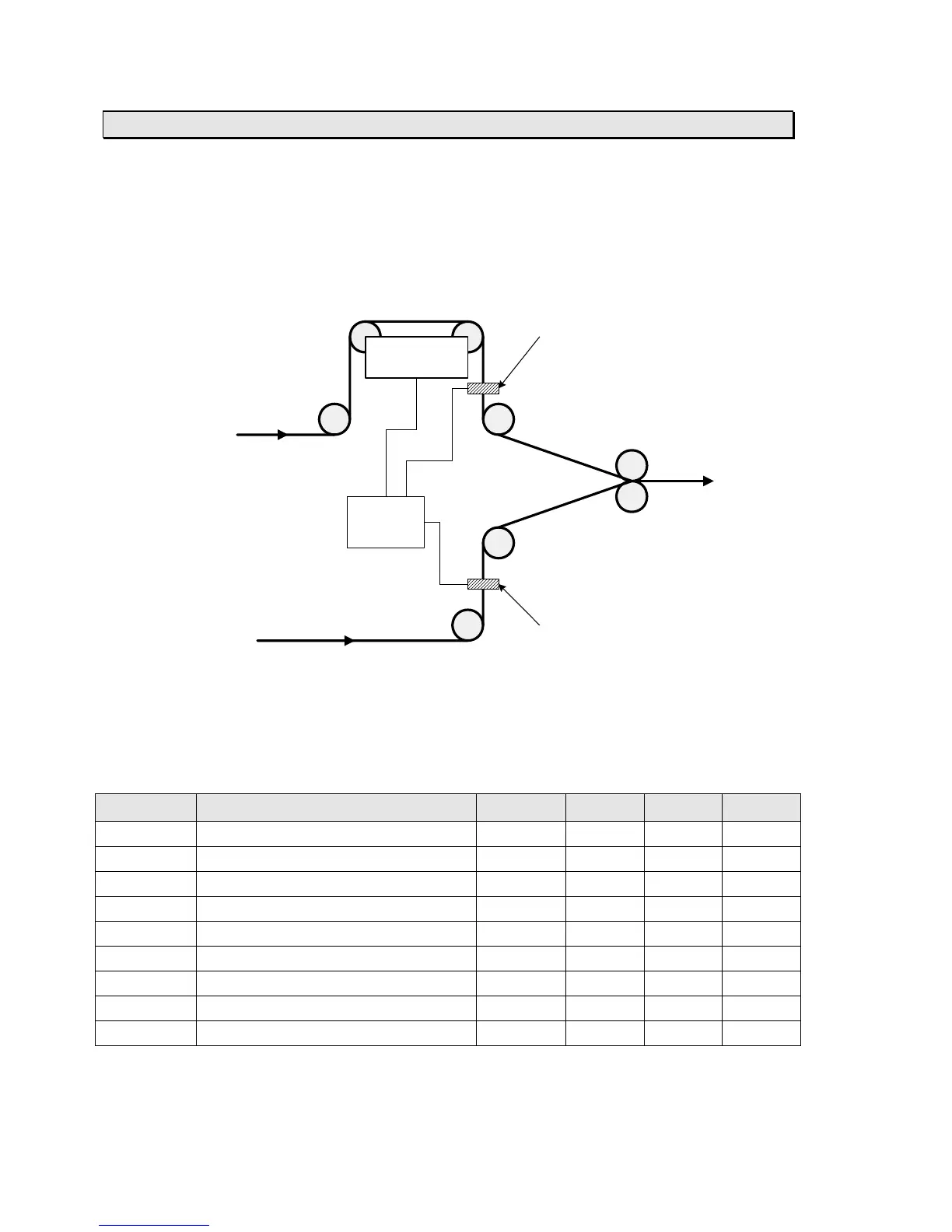
Appendix 11 / Chaser-Follower Configuration
The Chaser-Follower configuration is used whenever there is a need to align two webs prior to
joining them together.
The chaser sensor monitors the position of the first incoming web and the follower sensor
controls a web guide that steers the second incoming web. The chaser sensor controls the guide
point of the follower sensor, and this causes the web guide to align the second web with the first.
The alignment of the two webs can be fine-tuned by adjusting Offset 1 through the Remote
Station or web browser.
To configure the EVO 150 system for chaser-follower operation, set the controller parameters as
shown in the table below. Refer to page 21 for more information about setting controller
parameters.
Note: Sensor A is the follower sensor and Sensor B is the chaser sensor.
Parameter Description Range Default Setting Notes
12 Input A type 0-2 1 1
13 Input B type 0-2 0 1
24 Sensor A length 2-128 2
see note 1
25 Sensor B length 2-128 2
see note 1
36 Sensor A gap 0-2 1
see note 1
37 Sensor B gap 0-2 1
see note 1
63 Integrator mode 0-3 0 3
64 Integrator input 1 type 0-3 2 2
65 Integrator input 2 type 0-3 0 0
[continued on next page]
Guide Mechanism
Controller
Edge Detector B
Edge Detector A
Chaser Web
Follower Web