Rockwell Automation Publication 2094-UM002G-EN-P - August 2016 275
Configure the Load Observer Feature Appendix D
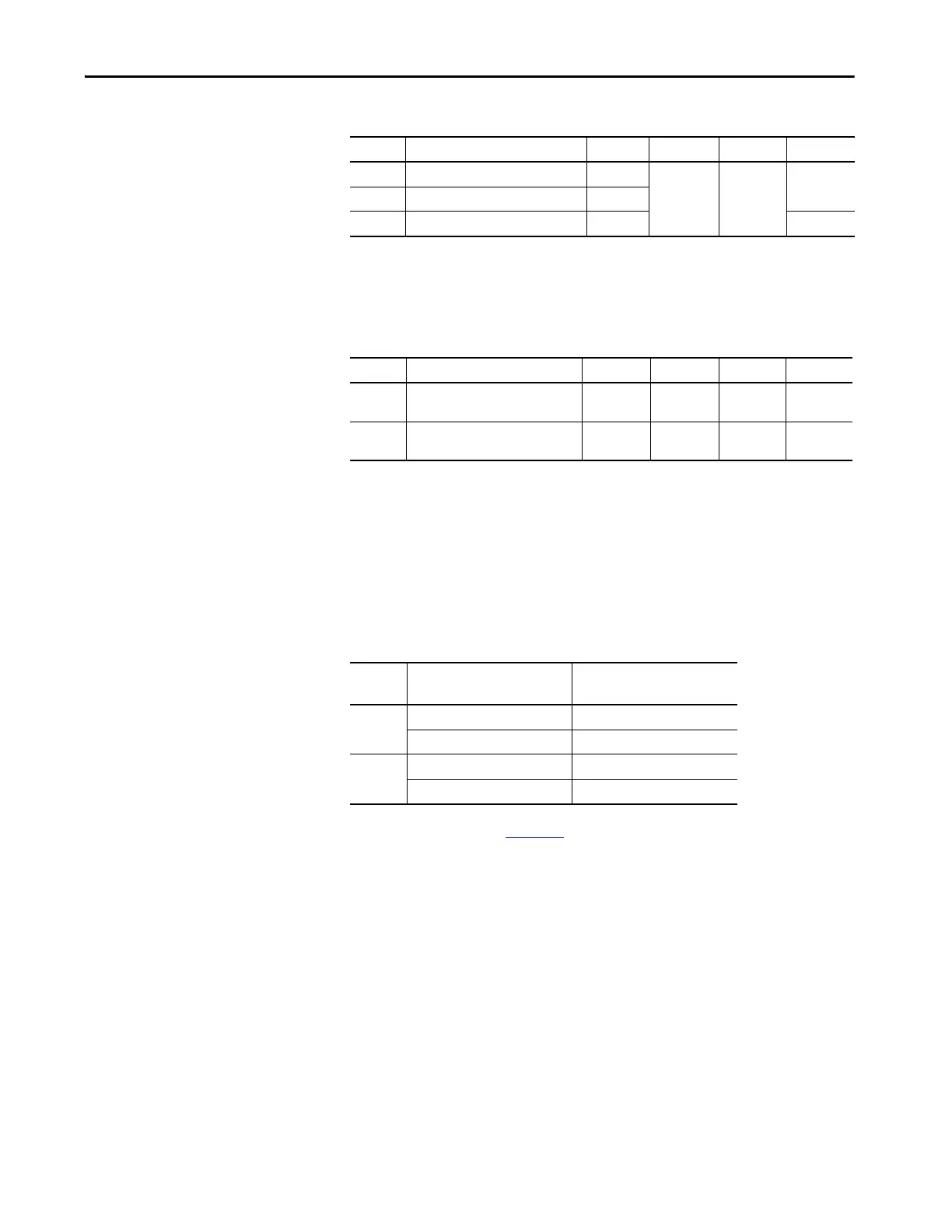
Table 123 - Load Observer Gain Parameters
The Acceleration Estimate and Torque Estimate signals are read by using
IDN-435 and P-436, respectively. Definitions for these IDN parameters are
given in the following table.
Table 124 - Load Observer Output Signals
When load observer and the torque low-pass filter are both enabled, and the
low-pass filter bandwidth is less than 5 times the load observer bandwidth,
their interaction can interfere with each other, causing instability. The low-pass
filter is always limited to a bandwidth under 400 Hz in drive firmware.
IDN P-065 can be used to override the torque low-pass filter bandwidth
limiting. The filter is also bypassed if the override IDN P-065 is set to 1 and the
torque low-pass filter bandwidth is set to zero.
Table 125 - Torque Low-pass Filter Bandwidth
Refer to Appendix F on page 307 for more information on changing IDN
parameter values with read/write messages in the Logix Designer application.
IDN Name Units Format Value, min Value, max
P:0:432 Load Observer Bandwidth (Kop) Rad/s
16 bit
unsigned int
0
12,500
65,535
P:0:433 Load Observer Integral Bandwidth (Koi) Rad/s
P:0:434 Load Observer Feedback Gain (Kof) – 200
IDN Name Units Format Value, min Value, max
P:0:435 Load Observer Acceleration Estimate Acceleration
32bit
signed int
-2
31
2
31
-1
P:0:436 Load Observer Torque Estimate Torque
16 bit
signed int
-2
15
2
15
-1
IDN
P:0:065
Bandwidth in the Logix
Designer Application
Actual Bandwidth in Drive
0
= 0 400 Hz
> 0 Limited to ≤ 400 Hz
1
= 0 Filter bypassed
> 0 Limited to ≤ 10,430 Hz

 Loading...
Loading...





