6 Parameter Settings and Functions
© Copyright Reserved Autonics Co., Ltd. 71
Setting
Group
Paramet
er
Setting Range
Factory
Default
Unit
Temperature L: 00.1 to10.0
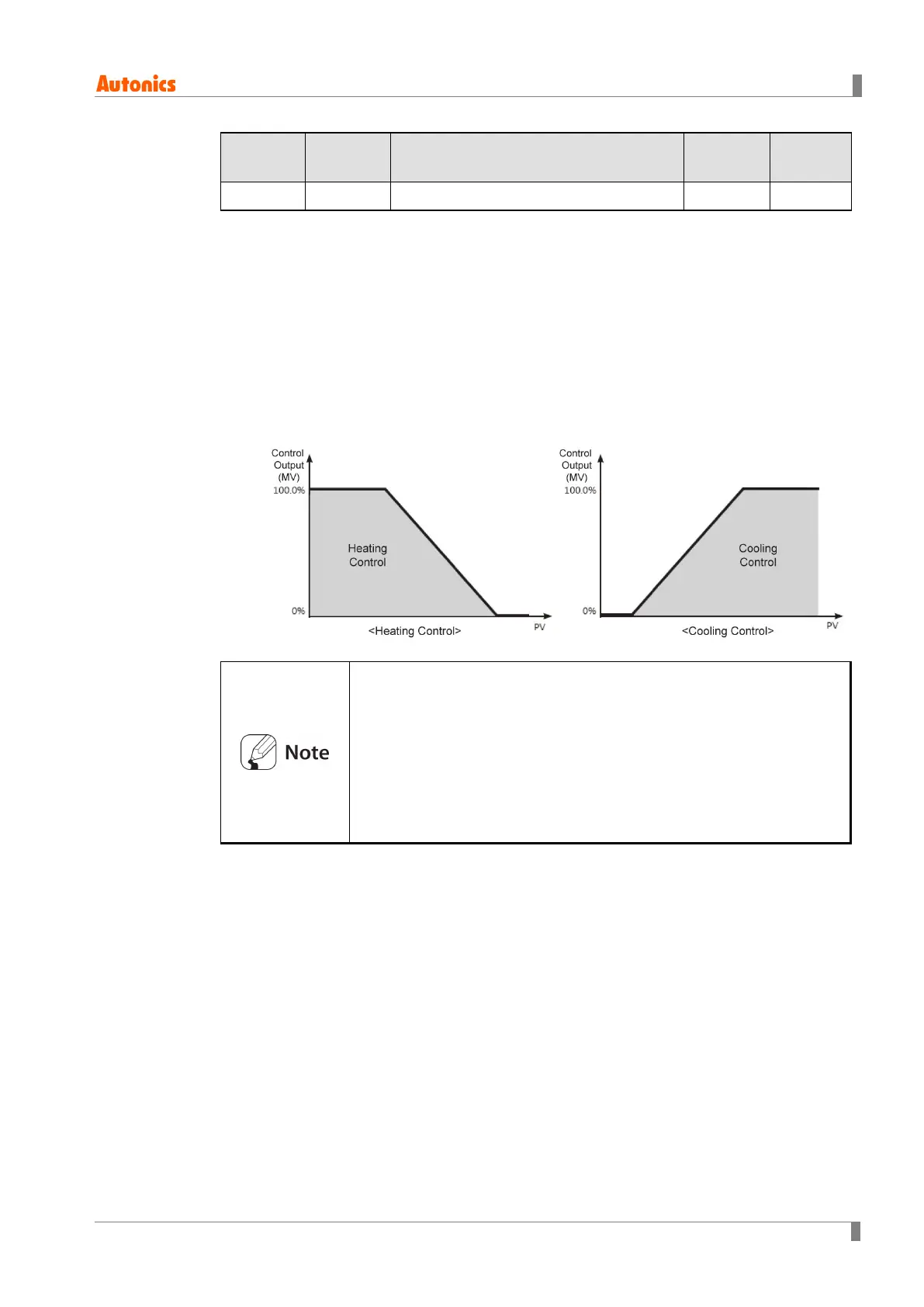
6.3.3 PID Control [PAR3 → C-MD → PID]
PID control is a combination of proportional (P), integral (I), and derivative (D)
controls and offers superb control over the control subjects, even with a delay time.
Proportional control (P) implements smooth, hunting-free control; integral control (I)
automatically corrects offsets; and derivative control (D) speeds up the response to
disturbance. Through these actions, PID control realizes ideal temperature control.
Applied PID Control Technique
Proportional Control (P): Select PID control and set the integral and
derivative time to 0000.
Proportional Integral Control (PI): Select PID control and set the
derivative time to 0000.
Proportional Derivative Control (PD): Select PID control and set the
integral time to 0000.
Multi SV: Use the same PID time constant for the values of SV0 to
SV3.