Receiving & Installation 3-9
MN1276
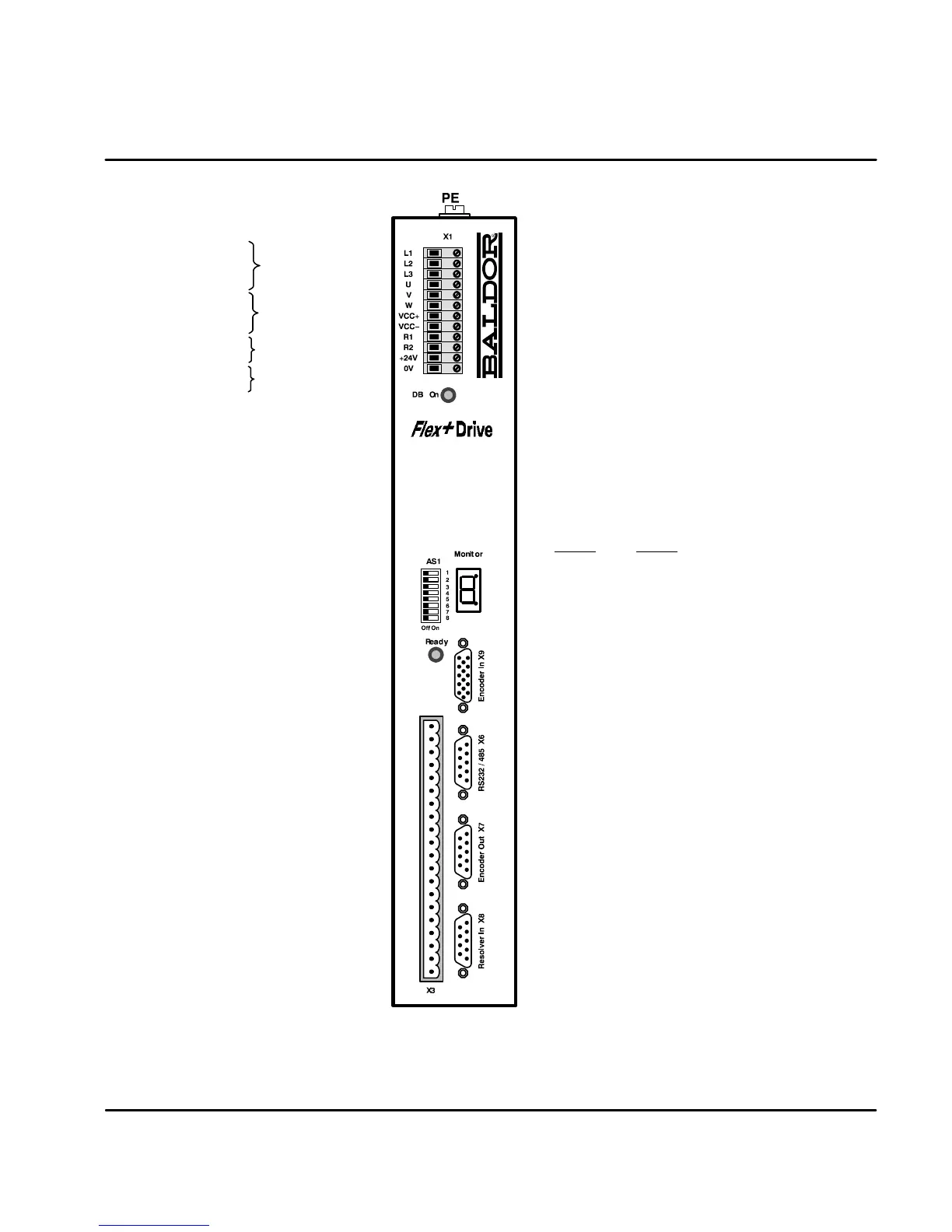
Figure 3-10 Connector Locations (Three Phase Controls)
X6 - RS232 / 485
RS232
RS485
1 Reserved 1 TX-
2R
x
Data 2 TX+
3T
x
Data 3 RX+
4DTR 4RX-
5 DGND 5 DGND
6DSR 6RTS-
7RTS 7RTS+
8 CTS 8 CTS+
9 +5V 9 CTS-
X3 - Control Signals & Digital I/O
1CMD+
2CMD-
3AGND
4 Fault Relay+
5 Fault Relay--
6CIV
7 CREF
8CGND
9 Enable
10 MaI3
11 MaI4
12 Quit
13 Fault Reset
14 Home Flag
15 Trigger
16 MaI1
17 MaI2
18 MaO1
19 MaO2
20 DrOK
X1 - Power Connector
PE Earth
L1 Phase 1 Input
L2 Phase 2 Input
L3 Phase 3 Input
U Motor lead “U”
V Motor lead “V”
W Motor lead “W”
R1 Dynamic Brake
R2 Dynamic Brake
+24V Customer
0V Provided
Dynamic Brake
(Regen Resistor)
Motor
Input Power
X7 - Simulated Encoder Output
1 CHA 6 CHA--
2 CHB 7 CHB--
3 CHC 8 CHC--
4 Reserved 9 Reserved
5DGND
¡ Important:
FPxAxxxx-xxx3 only.
A separate 24VDC supply to the “Logic Power” input is required for
operation. An FPxAxxxx-xxx3 control will not operate without 24VDC on this input.
FPxAxxxx-xxx3
only ¡
X8 - Resolver Input
1 REF 6 REF--
2 COS 7 COS--
3SIN 8SIN--
4 Reserved 9 Reserved
5AGND
Note: Reserved means no connection is required
and no connection should be made to this
terminal. It is reserved for future use.
X9 - Encoder Feedback Option
(only --Exxx versions)
1 CHA+ 9 HALL3+
2 CHB+ 10 HALL2+
3 CHC+ 11 +5VDC
4 HALL1+ 12 N.C.
5 HALL1-- 13 DGND
6 CHA-- 14 HALL3--
7 CHB-- 15 HALL2--
8 CHC--
Terminal tightening torque is
0.5 lb-in (0.6Nm)
The holes in the top and bottom of the
enclosure are for cable clamps. Be sure
to use an M4 bolt 12mm in length.
Longer bolts may short circuit the
electrical components inside the control.
 Loading...
Loading...
