Commissioning
EL70x1154 Version: 4.4
Attention
Caution when using the RELATIVE_CHANGE positioning
The change by means of RELATIVE_CHANGE must be used with caution, since the cur-
rent position of the motor is also used here as the start position. Due to propagation delays
in the system, the position indicated in the PDO never corresponds to the actual position of
the motor! Therefore a difference to the desired target position always results in the calcu-
lation of the transferred position delta.
Note
Time of the change of the target position
A change of the target position cannot take place at an arbitrary point in time. If the calcula-
tion of the output parameters shows that the new target position cannot be readily reached,
the command is rejected by the terminal and the Command rejected [}149] bit is set. This
is the case, for example, at standstill (since the terminal expects a standard positioning
here) and in the acceleration phase (since at this point the braking time cannot be calcu-
lated yet).
CALI_PLC_CAM/ CALI_HW_SYNC/ SET_CALIBRATION/ SET_CALIBRATION_AUTO/
CLEAR_CALIBRATION:
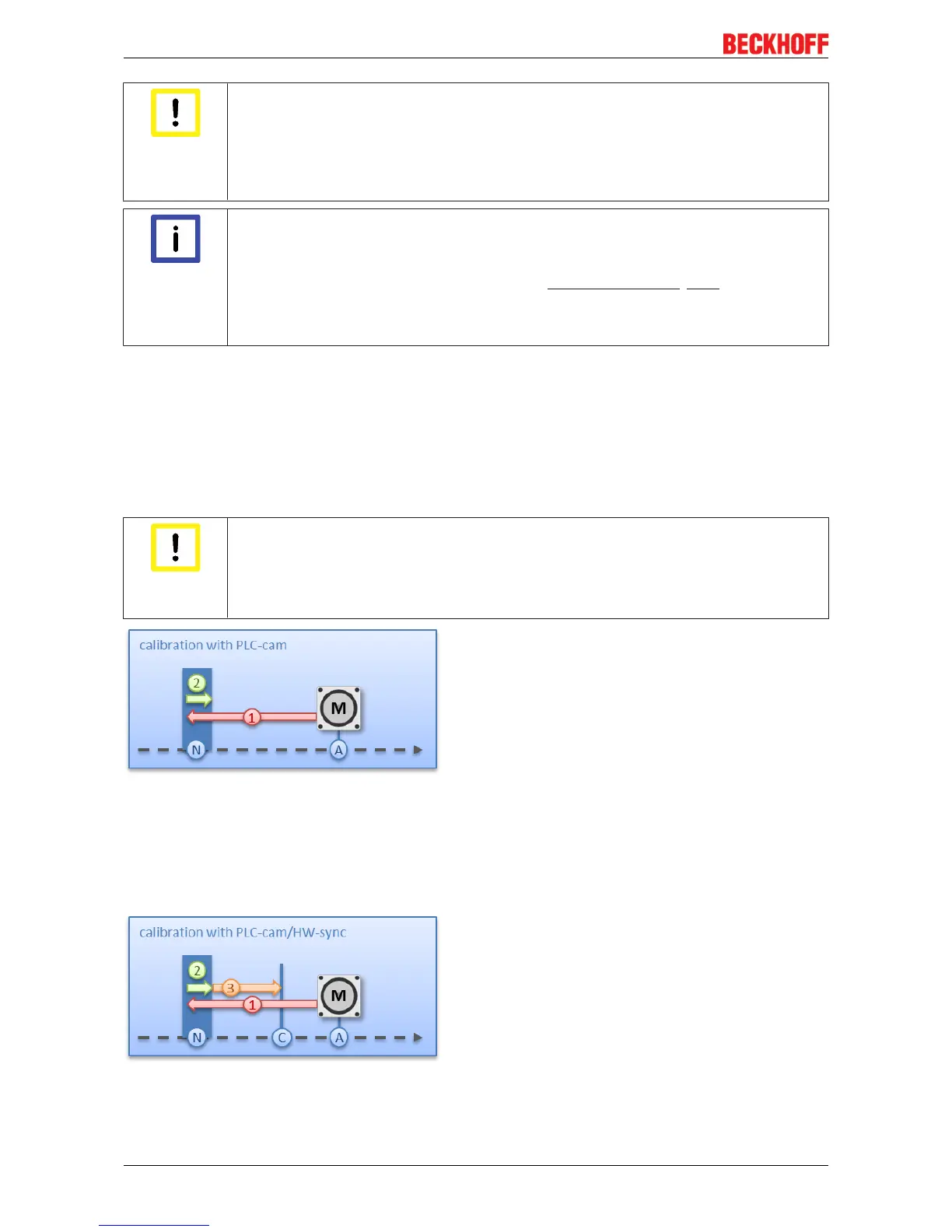
The simplest calibration case is calibration by cam only (connected to one digital input).
Here, the motor travels in the 1
st
step with velocity 1 (Index 0x8020:09) in direction 1 (Index 0x8021:13)
towards the cam. Subsequently, in the 2
nd
step, it travels with velocity 2 (Index 0x8020:0A) in direction 2
(Index 0x8021:14) away from the cam. After the In-Target timeout"(Index 0x8020:0C) has elapsed, the
calibration position (Index 0x8020:08) is taken on by the terminal as the current position.
Attention
Observe the switching hysteresis of the cam switch
With this simple calibration it must be noted that the position detection of the cam is only
exact to a certain degree. The digital inputs are not interrupt-controlled and are "only"
polled. The internal propagation delays may therefore result in a system-related position
difference.
Fig.180: Calibration with cam
For a more precise calibration, an HW sync pulse (C-track) is used in addition to the cam. This calibration
proceeds in exactly the same way as described above, up to the point at which the motor travels away from
the cam. The travel is not stopped immediately; instead, the sync pulse is awaited. Subsequently, the In-
Target timeout runs down again and the calibration position is taken on by the terminal as the current
position.
Fig.181: Calibration with cam and C-track