Commissioning
EL70x1166 Version: 4.4
Fig.187: Process data tab - Predefined PDO Assignment, EL70xx
5.8 Application example
Note
EtherCAT XML Device Description
The display matches that of the CoE objects from the EtherCAT XML Device Description.
We recommend downloading the latest XML file from the download area of the Beckhoff
website and installing it according to installation instructions.
Motor control with visualization
Sample program (https://infosys.beckhoff.com/content/1033/el70x1/Resources/zip/3696560907.zip)
Used Master: TwinCAT 2.11 (for older versions the control loop has to be programmed manually; in this case
it is already implemented in the NC).
This application example demonstrates movement of a motor to any position or in continuous mode with the
aid of visualization. The velocity, the starting acceleration and the deceleration can be specified.
The sample program consists of 2 files (PLC file and System Manager file).
First open the PLC file and compile it so that you have the *.tpy file available that is required for the System
Manager.
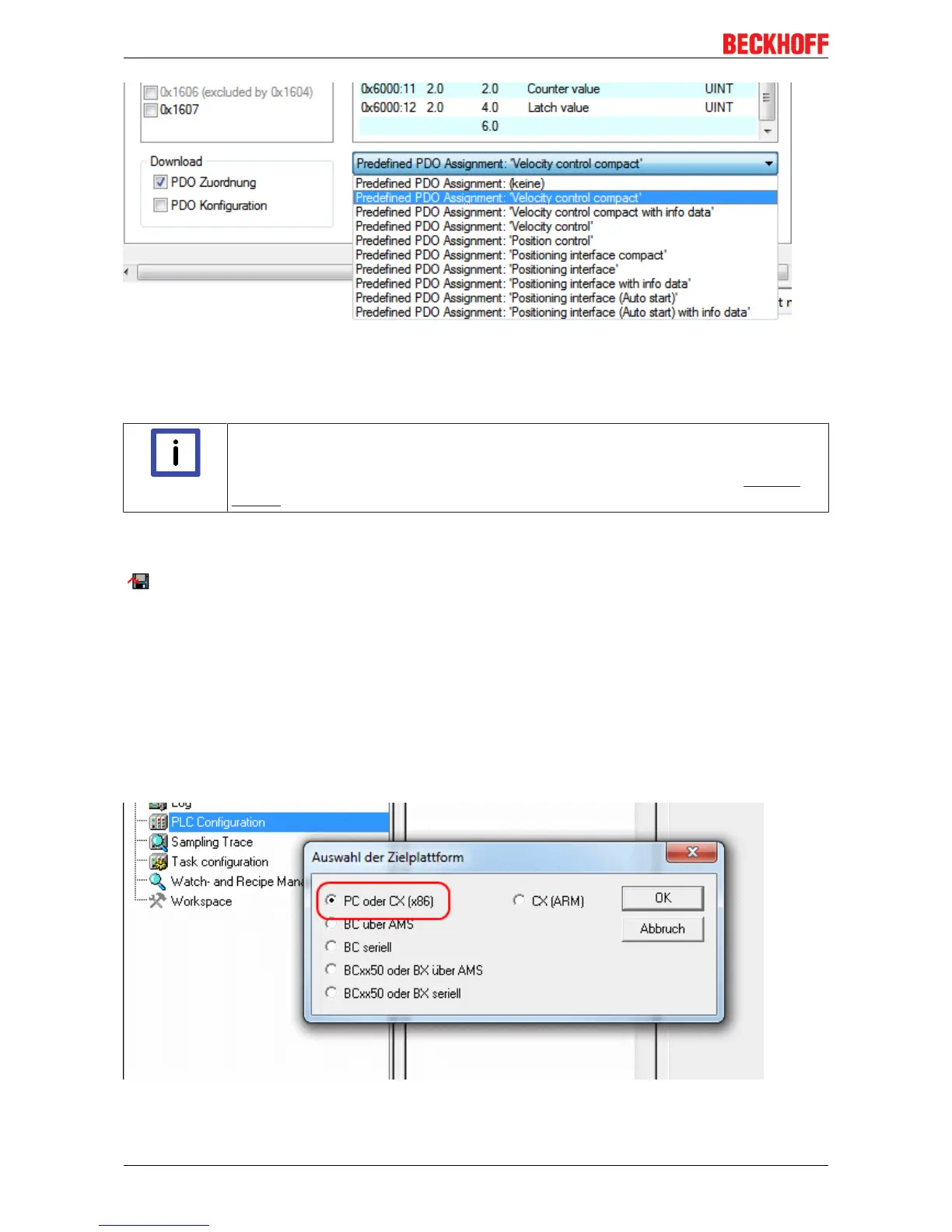
Please note that you may have to adjust the target platform in the PLC program (default: PC or CX 8x86). If
required, you can select the right target platform in the Resources -> Controller configuration tab.
Fig.188: Selection of the target platform
Please note the following for the System Manager file: