1110 - 89
DIGITAL INDUSTRIAL CONTROLLER
english
On the basis of Kcrit and Tcrit, the controller parameters can then be calculated in
accordance with the following table.
Parameter settings according to Ziegler and Nichols:
Controller type Parameter settings
P controller Kp = 0,5 Kcrit - -
PI controller Kp = 0,45 Kcrit Tr = 0,85 Tcrit -
PID controller Kp = 0,6 Kcrit Tr = 0,5 Tcrit Tv = 0,12 Tcrit
The Ziegler and Nichols adjustment rules were determined for P systems with a
time delay of the first order and a dead time. However, they apply only to controllers
with a disturbance response, but not to controllers with a command response.
Adjustment rules according to Chien, Hrones and Reswick (manipulated varia-
ble methods)
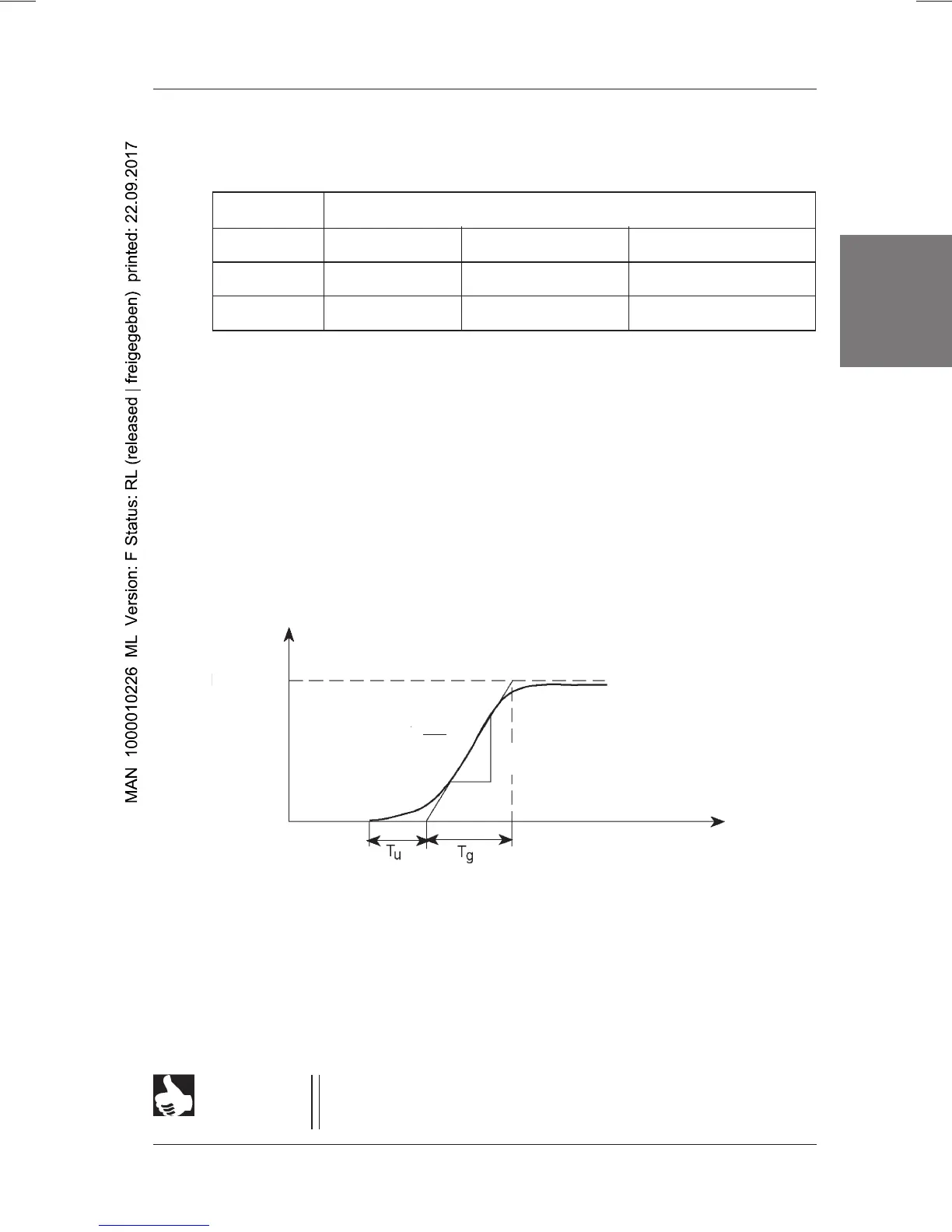
When using this method, the controller parameters are adjusted on the basis of the
control system’s transition response. A 100 % change in the manipulated variable is
output. The times Tu and Tg are derived from the progression of the actual value of
the control variable (Figure 45). Ks is the proportional action coefficient (gain) of the
control system.
Figure 45: Progression of the controlled variable after a manipulated variable
change
∆
CO
Method:
• Set the controller to MANUAL mode
• Output a manipulated variable change and record the controlled variable with a
recorder
• Switch off in good time if you encounter critical progressions (e.g. a risk of
overheating).
NOTE
Pay attention to the fact that, in thermally inert systems, the actual
value of the controlled variable may increase further after switching
off.
Ks * ∆CO
Actual value
∆PV
∆t
∆PV
∆t
t
 Loading...
Loading...






