C-Nav Hardware Reference Guide
11
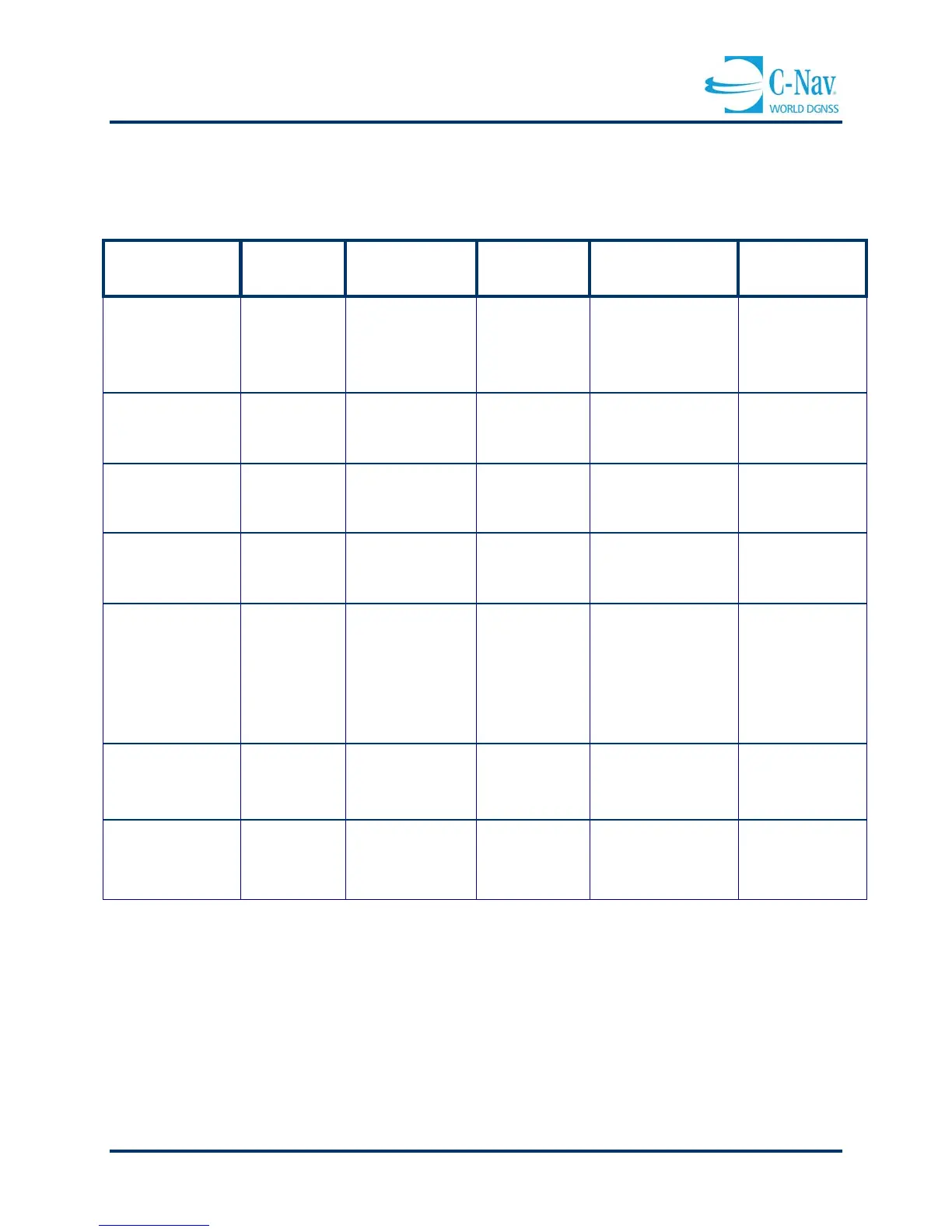
The following table describes some of the statistical formulas and measures commonly used for
GNSS positional accuracy measurement:
Table 1-1: Common Accuracy Measures Used with GPS
*(Mikhail, 1976) †(Langley, 1991) **(National Geodetic Survey, 1986)
Common Values Used with GNSS
• Speed of light ….. c = 299792458 meters per second
• L1 frequency …... f
L1
= 1575420000 Hz
• L2 frequency …... f
L2
= 1227600000 Hz
• Wavelength ……. λ = c/f (meters per second)
• L1 wavelength …. λ
L1
= 0.190293672798 meters
• L2 wavelength …. λ
L2
= 0.244210213425 meters
Measurement
Dimension
Statistical
Measure
Abbreviation Probability Approximation
Related
Expressions
1D
Root Mean
Square
rms 68.3%* σ
MSE – mean
square error
(the square of
the rms)
1D
Probable
Error
PE 50%* 0.674 σ** N/A
2D
Error
Ellipse
N/A 39.4%*
Defined by σ
x
, σ
y
& correlation
N/A
2D
Circular
Error
Probable
CEP 50%*
Radius:
0.589 (σ
x
+ σ
y
)*
CPE – also
called circular
probable error
2D
Twice
Distance
Root Mean
Square
2drms
Varies, 95.4
– 98.2%
†
Radius: 2σ
†
σ = √ σ
2
x
+ σ
2
y
2
nd
, less
common
definition: 2
dimensional
rms (circle’s
radius 1 σ)
3D
Error
Ellipsoid
N/A 19.9%*
Defined by:
σ
x
, σ
y
, σ
z
&
correlations
N/A
3D
Spherical
Error
Probable
SEP 50%*
Radius:
0.513 (σ
x
+ σ
y
+
σ
z
)*
called
spherical