9
2.2 Main Components
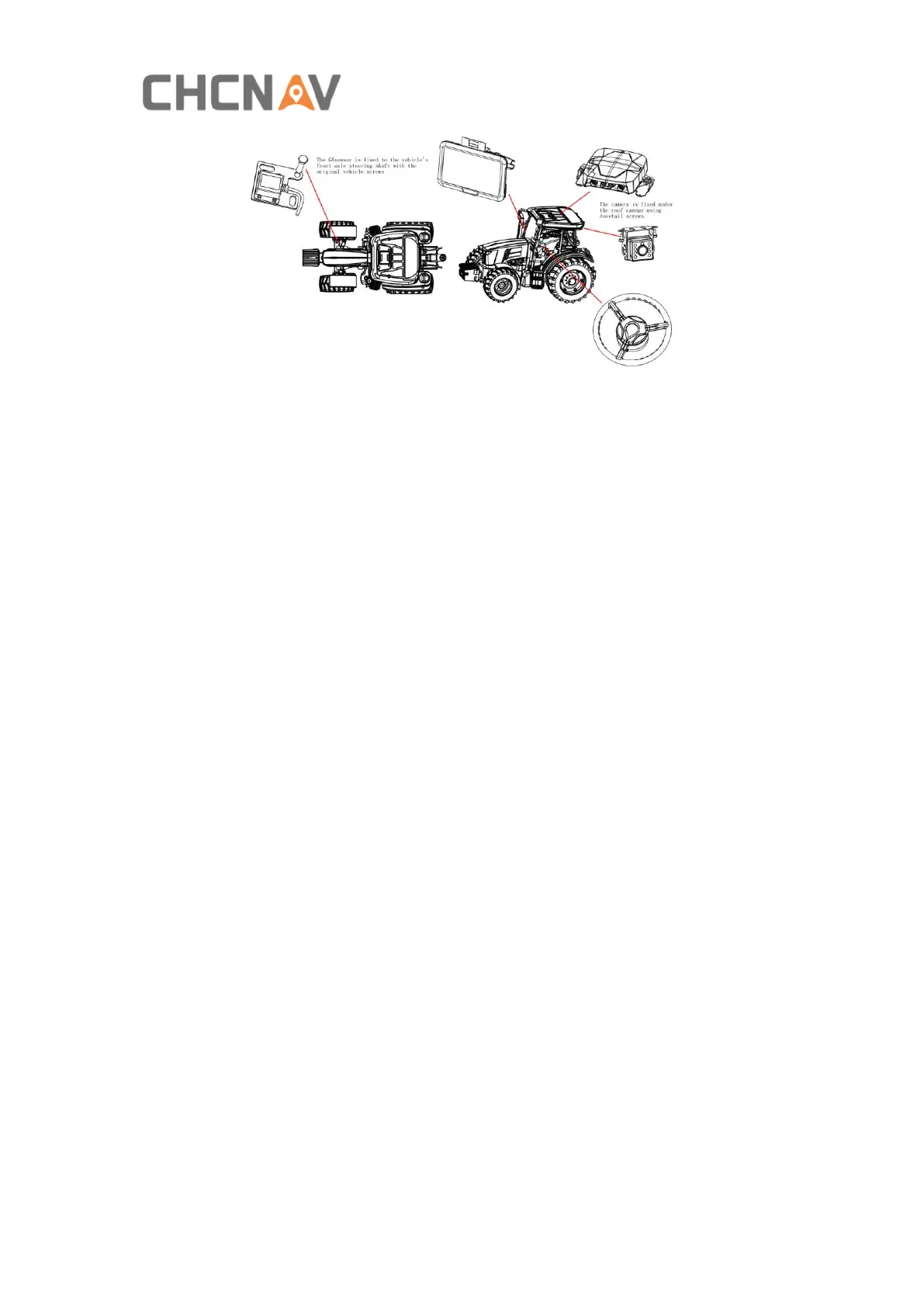
Receiver: It is typically a Global Navigation Satellite System (GNSS) receiver, used to
receive satellite signals to determine the accurate position, direction, and speed of
the vehicle. It forms the foundation for autosteering system by providing precise
information about the current location of the vehicle.
Electric steering wheel: Consists of a steering motor and a steering wheel. and
provides steering control of the vehicle. The motor is primarily used to control the
movement of the vehicle with steering. The autonomous driving system utilizes the
motor to execute commands generated by path planning and navigation algorithms,
ensuring the safe movement of the vehicle along predefined trajectories.
Tablet: The tablet serves as the user interface for interacting with the autonomous
driving system. Farmers or operators can use the tablet device to set paths, monitor
job status, and configure the system. The tablet is also employed for real-time
monitoring of the vehicle's operation.
Wheel angle sensor: Obtains and provides angular velocity information of steering
wheels during vehicle operation. This is crucial for ensuring the vehicle travels
accurately along the predefined path. Sensor data helps calibrate the directional
control system, maintaining precision in movement.
Camera: Placed in the rear of the vehicle to provide real-time images. Cameras have
multiple uses in autonomous driving. They can be employed for obstacle detection,
helping the machinery avoid collisions or damage to crops.
These components work together to enable the autonomous driving system to
perform various tasks in the field, enhancing the efficiency and precision of
agricultural production.