ECON-4, SW version 1.4 rev.1, ©ComAp – March 2016 Draft 4
ECON-4 Reference guide.pdf
General description
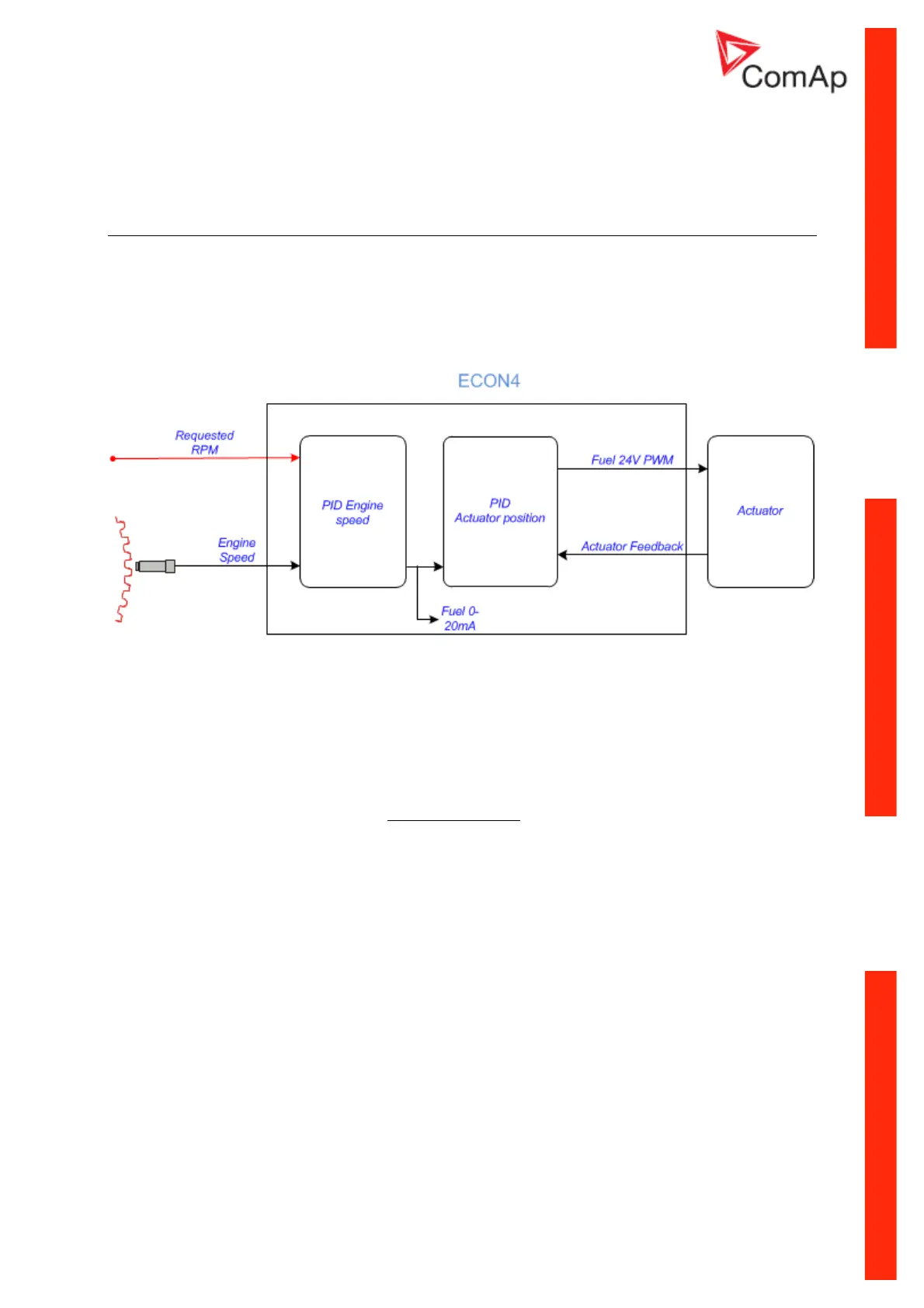
Description of the governor system
ECON-4 is a flexible speed governor capable to operate in various configurations. Possible
configurations can be:
a) Control via CAN – it reads the values of control bits and required analog values from the CAN
bus line and not from its terminals (expect from BIN S4.6 Run/Stop, this signal must be
present in all 3 modes)
b) Control via Binary signals
c) Control via Analogue and binary inputs.
Speed and power of a single fuel engine is always controlled by the actuator connected to ACT
terminals or Analog Output in case of actuator with 0-20mA(4-20mA) usage. This actuator can control
a fuel rack for diesel engines or a mixture throttle valve for gas engines.
ECON-4 ADV is advanced version, it is dedicated specially to control of engine in island operations
where load steps are expected.
Control by CAN-bus
ECON-4 can receive values of some binary and analog control inputs via CAN-bus communication
line from engine controller, (see section Inputs and outputs for list of shared inputs). This arrangement
can significantly simplify the wiring on site.
Control of speed request by CAN-bus is active only if setpoint Speed request has value DATA
Control of GCB and MCB feedback by CAN-bus is active only if setpoint CB request has value DATA.